一.前言
北京邮电大学机械工程专业在学校初创时期就已经开办,随后伴随着学校的发展稳步前进,其发展历程和沿革如图1.1所示。
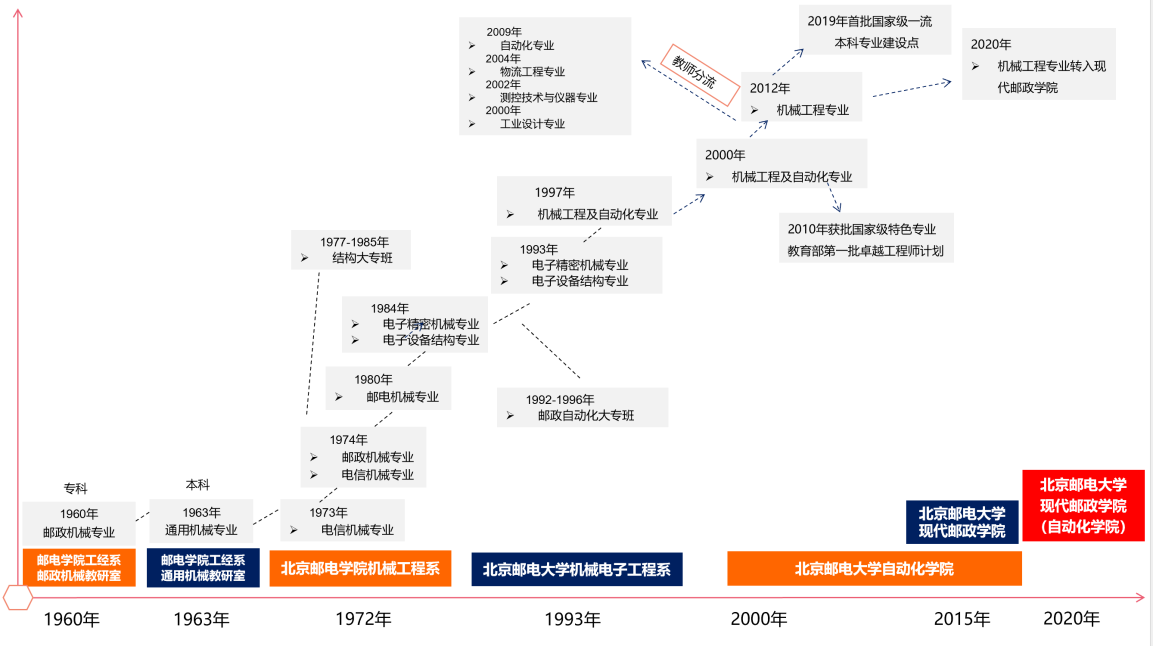
图1.1 北邮机械工程专业历史发展历程和沿革
二.专业初创期的奋斗
(说明:根据李景湧老师的回忆,李金泉老师增加了照片等少量资料,并略作排版和整理)
1960年,邮电部为推进邮政自动化工作的进程,委托北京邮电学院筹办邮政机械专业。同年,北京邮电学院在工经系成立了邮政机械教研室,当时有教师6人,刘永为任组长,并派青年教师到上海交大进修,当年招收邮政机械专业专科班118人。这个班的学员1963年毕业,他们是我国邮政机械化、自动化的先行者和骨干力量,为我国邮政事业做出过杰出的贡献。
为了促进我国邮政事业的现代化,从1963年起,工经系正式招收通用机械专业本科班。为了加强教学工作,邮政机械教研室与机械原理、机械零件教研室合并成立了通用机械教研室,归基础部管理,基础部原有力学教研室和工艺教研室,这就为后来成立机械系打下了良好的基础。
通用机械专业在文化大革命前的1963年、1964年、1965年共招收学生92人。在此期间,该专业的教师们参加了邮电部组织的邮政自动化技术革新会战,1964年参加了北京邮政局的自动化邮局会战(研制自动邮资机等),1965年、1966年分别在上海邮政局和北京邮政局参加了自动包裹分拣机的会战。他们为我国邮政事业的现代化与自动化作出了重要贡献。

图2.1徐大雄
(国家科技进步奖获得者、吉尔吉斯斯坦共和国国家科学院外籍院士)
1972年,北京邮电学院正式成立了机械工程系,系主任徐大雄,总支书记李丰。同年通用机械专业开始招生,1973年设电信机械一个专业招生,1974—1976年设邮政机械和电信机械两个专业招生,五年间共招收学生466人。当时的机械工程系有80名教师,分三个专业连队进行教学。
在此期间,除进行课堂教学以外,老师还带领学生下厂实践:
1. 一部分人参加了广州流花邮局运转车间的技术革新与改造工程,设计制造了我国第一套分拣邮袋的推式悬挂系统。
2. 一部分人参加了北京市话局沙窝修配厂的技术革新工作。
3. 一部分人参加了北京无线电仪器厂的技术革新工作,改进了机床的自动化程度。
4. 一部分人参加了北京市话局77分局准电子交换机的结构设计。
5. 部分教师参加了邮电部重点项目“信函分拣自动化系统”的研发工作。
这些都为我国邮电事业的发展贡献了他们的力量,受到企业的好评。
三.艰苦创业期的发展
(说明:根据李景湧老师的回忆,李金泉老师增加了照片等少量资料,并略作排版和整理)
1977年恢复高考当年,邮政机械、电信机械两个专业共招收了本科生122名。1979年开始招收机械设计学科硕士生2名。1977年至1985年机械工程系主任是高国安,副主任费时雨、车路(后为张彦林),总支书记李丰,副书记郭才旺。当时有教师80多名,分为六个教研室,即:邮政机械、电信结构、自动化、机械基础、机制工艺、工程力学。一部分教师仍参加邮政自动化方面的会战科研,另一部分专门从事电子设备结构方面的科研工作。由于信函分拣机是机光电一体化的机械,所以北邮的邮政机械专业可以说是我国最早的机电一体化专业。在教学计划中,与一般机类工程专业相比,机类学时要少一些,而电路、计算机、自动控制类课程要多一些。
在这期间,章继高、梁崇高、王士耕三位教师出国进修,两年后学成回国,为开展机械工程系的科研工作打下了良好的基础。
1977年至1984年,按教委的要求,专业名称有几次变动:1980年,邮政机械、电信机械两个专业合并为一个专业——邮电机械,到1984年邮电机械又分为电子精密机械和电子设备结构两个专业,同年又新增加了一个硕士点——机械制造。
从1977年到1985年共招收本科生780人,招收硕士28人,招收结构大专班66人。
1985年系领导班子进行了调整,系主任王士耕,副主任费时雨、王文秀,党总支书记郝维新(1990年张金声为书记),副书记相俊英。1993年,自动化教研室改为电路基础教研室,并成立了系中心实验室。
1985年至1993年招收本科生513人,硕士生41人,并从1992年开始招收邮政自动化大专班,一直办到1996年,五个年级共招收学生160人。在这期间,本科专业教学计划调整为纯机械专业。
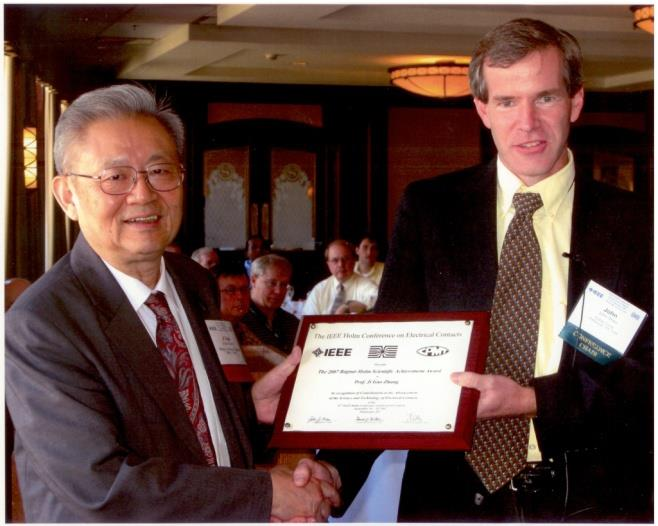
图3.1 章继高教授获得IEEE霍姆科学成就奖
(获得此奖的全球首位华人科学家,曾担任国际电接触顾问委员会委员多年)

图3.2 廖启征教授获授“庆祝中华人民共和国成立70周年”纪念章大会
在此期间,科研方面也有辉煌的成绩。梁崇高教授、廖启征教授在机构学方面取得了重大突破,解决了机构学的“著名的珠穆朗玛峰”问题,并获得了国家自然科学四等奖,在国际上也受到好评。章继高教授领导的科研组在电接触理论与机电元件可靠性方面取得了创造性的成绩,尤其对“尘土对电接触的影响”进行了全面的、深入的研究,揭示了尘土对电接触的机理,获得国家自然科学基金三等奖,后来获得IEEE霍姆科学成就奖。王士耕教授在数控加工方面有独到的研究,在我国首先解决了化工生产中叶轮曲面加工的数控问题。
1993年,系领导班子进行了新的调整,系主任张金声,副主任李景湧、孙百生,总支书记相俊英,副书记王翔。当时有教师45人,设有邮政机械专业教研室、结构专业教研室、机械基础教研室、电路基础及微机应用教研室和系中心实验室。1995年,按教育部要求,将原电子精密机械和电子设备结构两个专业合并为机械电子工程专业。
该届领导班子制定了“八五”发展规划,提出了以下几个目标:
1. 继续支持机械学和电接触两个科研组的发展,重点支持邮政自动化科研的发展,促进学术创新,为建立博士点创造条件。
2. 积极引进人才,建立一支高水平的师资队伍和学术梯队,争取尽快建成博士点。
3. 修订机械电子工程专业的教学计划,除继续办好邮政机械、电子设备结构两个方向外,要努力办好机电一体化方向,以适应边缘学科的发展。
4. 积极筹建自动化专业,扩大招生规模。
从1993年到2000年尽管系领导班子在不断调整,但他们始终带领大家为学校进入“211”,为早日建立机械类博士点而不懈奋斗。
这期间,系领导班子作出了以下调整:
1994年,系主任廖启征,系副主任李景湧、孙百生、周晓光。
1996年,李景湧任总支书记,程宏任总支副书记,周晓光、时良平任系副主任。
1997年,李景湧任系主任,邓中亮、时良平、周晓光任副主任。王强任总支书记,周晓光兼任总支副书记。

图3.3 廖启征老师
(获得1987年国家教委科技进步一等奖和1989年国家自然科学四等奖)

图3.4 李景湧老师

图3.5 周晓光老师

图3.6 邓中亮老师
(多次国家科技进步奖获得者,国际欧亚科学院院士)

图3.7 时良平老师
这期间制定了“九五”发展规划,并切实做好八件大事:
1. 1995年修订了机械电子工程专业的教学计划,调整机械类与电子类课程的比例,减少机械类课程学时,增加电路、计算机、控制类课程学时。使该专业更适合机电一体化方向,使学生更适应新形势的要求。
2. 1996年建立了工业自动化专业,1999年筹建工业设计专业。
3. 大力引进或培养人才,1993年教师中有博士学位的仅一人。到2000年,有博士学位的教师13人,占师资总数的47%。博士生导师由2名增加到7名。
4. 积极参加学校的“211工程”建设。建成了两个部级重点实验室——“电接触实验室”和“邮电机械自动化与智能化实验室”。
5. 自1997年到2000年科研经费累计2000多万元,购置了一批仪器设备,为以后的科研打下了良好的基础。
6. 1997年开始招收了“计算机通信”专业成人大专班,不仅培养了大批学生,也改善了教学条件。
7. 1998年,建成机械工程硕士点一个。
8. 1999年,组织部分教授集资建设实验室用房1360m2,为后来扩大招收研究生打下了基础。
在该阶段,建有原邮电部的通信与电子系统连接可靠性部级重点实验室、邮电机械自动化与智能化部级重点实验室,国家认证监督委员会认证的电接触检测实验室,这些省部级实验室为专业的科研提供了支撑。
四.千禧年后的开枝散叶与基础夯实
4.1 发展简介
2000年,机械电子工程系正式更名为自动化学院。院长孙汉旭,副院长刘晓平、许良军,总支书记相俊英,刘晓平兼任副书记。
2003年,学院领导班子进行调整,院长孙汉旭,副院长许良军、杨军,总支书记相俊英,副书记庄育锋;2005年6月,相俊英书记调到北京邮电大学世纪学院任职,陈丽媛担任总支书记;2008年,根据学校的政策,聘请王天然院士担任院长,王院士于2008年12月2日到自动化学院参加了受聘院长仪式,学院执行院长孙汉旭,副院长许良军、贾庆轩,总支书记张正杨,副书记庄育锋。

图4.1王天然 中国工程院院士

图4.2 孙汉旭老师

图4.3贾庆轩老师

图4.4许良军老师

图4.5杨军老师
图4.6庄玉锋老师

图4.7 刘晓平老师

图4.8 陈丽媛老师
在这期间,自动化学院设置的本科专业有了较大的变化:
1. 2000年新增工业设计本科专业,由侯文君担任第一任教研室主任,王飞任支部书记,原工程图学的相关教师转入该专业。
2. 2001年新增检测技术与自动化装置硕士点,2002年新增测控技术与仪器本科专业,由高宝成担任第一任教研室主任,周慧玲任支部书记,机械专业部分老师转入该专业;
3. 2004年新增物流工程本科专业,2005年新增物流工程硕士点,由杨福兴担任第一任教研室主任,翁迅任支部书记,机械专业部分老师转入该专业;
4. 2008年接手建设自动化专业,由杨军担任第一任教研室主任,郭磊任支部书记,初始阶段该专业的全部教师都是由自动化学院的相关教师特别是机械工程专业的教师转入。
由此,自动化学院的学生规模有了很大的增加:本科生招生人数从2000年150人发展到2005年306人,研究生招收人数也由每年30多人扩大到每年120多人,机械工程及自动化专业每届本科生发展为每年3个班,90多人。
虽然2007年前后自动化学院进了一批新教师,但是因为自动化及工业设计等相关专业的设置导致教师分流,机械专业的专任教师数量仍然缩减为10余人,最少时为12人,随后因为多种原因教师数量缓慢增长,平均差不多两年新进一位教师。
在这期间,机械工程及自动化专业对应的为机电工程教研中心,属于自动化学院下设的二级单位,2000年左右由郝仰梅老师担任中心主任,樊利民老师担任支部书记, 2002年-2003年由魏世民老师担任支部书记,2003年魏世民老师转任中心主任,中心支部书记为李端玲老师,2008年李端玲出国做访问学者后由孔志刚担任支部书记。2011年,自动化学院重视本科教学工作,为各个教研中心配备专门负责教学的常务副主任,李金泉担任机电工程教研中心的教学常务副主任。
在这期间,机械工程专业稳步向前发展,在教学、科研、支撑平台等几方面夯实了基础。
4.2 教学方面
2010年机械工程及自动化专业申报了教育部第一批“卓越工程师培养计划”并获得批准,成为全国首批66家获批单位之一。王飞老师负责的工程图学课程被评为2009年度北京高等学校市级精品课程,王飞老师荣获2009年北京邮电大学教学名师奖。2011年《理论力学》(贾庆轩老师负责)获得“北京邮电大学2011年校级精品课程”荣誉称号,在此之前,《工程图学》(王飞老师负责)和《机械原理》(廖启征老师和魏世民老师负责,2004年)已分别获得北邮的校级精品课。
图4.9 工程图学被评为北京市精品课
2010年自动化学院与法国亚眠工程学院签署了双学位硕士研究生联合培养协议。可招收“机械工程”和“物流工程”专业获得研究生入学资格的学生。2010年机械工程及自动化专业获批国家级特色专业。
2010年12月,自动化学院与中国普天集团签署了产学研研究生联合培养基地协议。
2011年自动化学院通过召开多次院务会、两次院学术委员会,专门讨论了人才战略,明确高级职称人才在学院的学科战略发展需求。确定学院重点发展现有机械工程、控制科学与工程一级学科;同时,兼顾工业设计、物流工程和测控技术与仪器学科的全面发展的思路。
2011年3月11日,机械工程领域工程硕士贵州航天电器班正式开班,共有28名学员在读,这是自动化院举办的第一个工程硕士班,为今后以多种方式服务社会开创了先例。
2011年张恒文老师获北京邮电大学教学观摩评比二等奖。
2012年,与洛阳市中国一拖集团等单位进行接洽,签署了实习基地协议,从2013年开始由李金泉和2位老师+1位辅导员组成的教学团队,带领3个班90多名同学远赴洛阳在众多企业里进行实习,此举开创了北邮的先河。
4.3 学科建设
北邮的机械类学科建设始于1981年,1981年获得机械电子工程硕士学位授权点,机械设计及理论于1990年获得硕士学位授权点,机械制造及其自动化于2003年获得硕士学位授权点,到2006年,几个二级学科硕士点升级为一级学科硕士点:机械工程的硕士学位授权点。2008年,机械电子工程获得北京市教委的重点学科。
2003年获得机械电子工程二级学科博士学位授权点。
4.4 平台建设
在此期间建设的教学科研平台如表4.1所示,这些平台为学院和专业、学科的发展提供了支撑。
表4.1 平台建设
名 称 |
批准部门或 合作单位 |
批准时间 |
空间机器人技术教育部重点实验室(B) |
教育部 |
2008 |
空间机器人技术教育部工程研究中心 |
教育部 |
2007 |
北京市邮政智能装备工程技术研究中心 |
北京市科委/邮政科学研究规划院 |
2017 |
安全生产智能监控北京市重点实验室 |
北京市科委 |
2010 |
电信测试实验室(原名:电接触检测实验室) |
国家认监委 |
1994 |
北京市机电工程实验教学中心 |
北京市教委 |
2008 |
校内实训实践基地 |
北邮华飞研究所 |
2003 |
校外产学研联合培养基地、实训实践基地
|
中国空间技术研究院北京空间飞行器总体部 |
2013 |
北京市报刊发行局 |
2006 |
普天物流技术有限公司 |
2008 |
中国一拖集团等 |
2012 |
4.5 科研方面
2013年前后,自动化学院领导班子确定了机械工程学科的6个优势发展方向及学科带头人,如表4.2所示(摘自学院的报告)。
表4.2 机械工程学科的优势发展方向
学 科 方向 |
学科带头人 |
空间机器人技术 |
孙汉旭 |
机器人机构学 |
廖启征 |
电子电气连接的可靠性 |
许良军 |
虚拟现实技术 |
贾庆轩 |
光机电一体技术 |
刘晓平 |
制造过程监控与制造业信息化 |
杨福兴 |
当时的优势科研方向简介(摘自学院的报告)如下:
1. 空间机器人技术
1) 1995年,研制成功了我国首台气浮式大型舱外机械臂,1999年获部级科技进步二等奖。2006年完成了国家863飞行机器人的重点项目研制,2007年空间机器人技术XXXX项目获军队科技进步二等奖;
2) 研制出了BYQ-1、BYQ-2、BYQ-3等球形机器人样机,通过了北京市组织的部级鉴定会,被认为达到国际先进水平;
3) 2007年,空间机器人技术教育部工程研究中心获得批准建设。这是国内目前唯一的空间机器人工程研究中心;
4) 2008年,空间机器人技术教育部国防科技重点实验室获得批准建设。

图4.10 球形机器人
|

图4.11 模块化机器人
2.机器人机构学方向
1) 1986年攻克了被喻为机构学的珠穆朗玛的一般7R机构的位移分析。
2) 1987年国家教委科技进步一等奖。
3) 1989年,机构的位移分析成果获国家自然科学四等奖。
4) 2003年全国物流采购联合会科学技术进步三等奖。
5) 在机器人理论与机构学方面的研究处于国际领先水平。

图4.12 并联机床
|
图4.13 参观电连接实验室
3.电气电子连接的可靠性
1) “尘土污染对电接触可靠性影响”研究,1991年获得国家自然科学三等奖;
2) “尘土与腐蚀性气体对电接触影响”的研究获得波兰突出成果奖;
3) 带头人章继高,1988年至今一直担任国际电接触顾问委员会委员,2007年获IEEE霍姆科学成就奖。
4.虚拟现实技术
1) 由北邮、北航、上海交大三校联合的DOM虚拟中心总部设在北邮;
2) 国内最大的、直径五通道220°的环幕虚拟现实系统;
3) 完成了上海光华胶印机厂四色彩色印机数字化样机设计与虚拟展示。
4) 承担国家863、国家自然科学基金等多项科研任务。

图4.14 参观虚拟现实系统
|
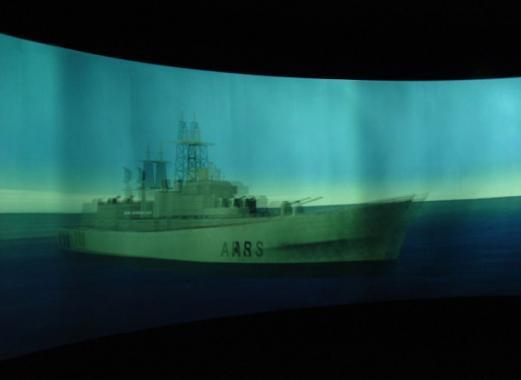
图4.15 五通道220°的环幕虚拟现实系统
5. 邮政自动化与物流技术
1) 1975年研制国内第一套邮袋推式悬挂自动分拣系统和国内第一台信函自动分理机,1978年获全国科学大会二等奖;
2) 邮件动态称量基本技术研究,1997年邮电部二等奖;
3) 邮政蓄电池牵引车,1997年邮电部二等奖;
4) 信盒输送系统,1998年邮电部一等奖;
5) 为信产部和国家邮政局制定了23项技术标准;
6)系列装卸过桥,2003年中国物流与采购联合会科学进步三等奖。
图4.17 通信设备动态分析
|
图4.16 物流装备研发
6. 测控技术与故障诊断
1) 主要从事通信设备结构动态设计及其抗震特性研究、系统参数辨识、设备结构振动与智能控制技术、设备状态监测监控与设备无损探伤检测技术、故障诊断技术的研发等工作;
2) 承担着国家863计划项目、省部级教学科研课题以及与企业间的合作项目。与多家通信、航空和机械制造企业、高校以及研究机构有着密切的联系与合作;
3) 与通信设备制造企业合作正式建立了联合实验室“北邮—梅泰诺联合实验室”与“北邮—梅泰诺联合实验室研发基地”,从事通信塔结构设计、设备状态监测、通信设备美化造型设计等研发工作。
7.光纤光缆检测技术
林中老师创建的北邮布莱德公司,拥有光纤光缆检测资质,在光纤光缆制造和检测行业拥有很高的声誉。
1) 研制了多系列全套光缆机械性能检测设备,是目前世界上功能最全、技术最先进的,被国内外著名的光纤光缆制造公司装备使用。
2) 研制了NE1000型高精度扭矩标准机,可对扭矩传感器进行标定,已批量生产,正在服务于我国的国防工程。
3) 研制了奥林匹克森林公园管理中心地源热泵空调运行监测系统,为科技部“十一五”项目。
4)完成了太阳能热水相变蓄热新风供暖系统实验平台研制,为北京市教委纵向项目。

图4.18 学生参观光纤检测设备
|

图4.19 林中为学生讲解光纤检测设备
千禧年之后,贾庆轩老师、李端玲老师分别获得教育部新世纪优秀人才称号,余瑾、李金泉老师获得北京市优秀青年工程师称号,李金泉老师入选北京市优秀青年工程师评选活动20周年纪念大会的30名优秀代表,张延恒老师入选北京市 青年英才计划。
2000~2013年之间,北邮机械工程专业的教师与科研相关的获奖情况如表4.3所示。
序号 |
项目名称 |
项目完成人 |
时间 |
获奖等级 |
1 |
IEEE霍姆科学成就奖 |
章继高(1) |
2007 |
|
2 |
XXXX非接触排爆技术研究 |
孙汉旭,贾庆轩等 |
2010 |
军队科技进步二等奖 |
3 |
JK863-2007741003(编号:2007KP2012) |
孙汉旭、贾庆轩、梅涛、叶平、邵志宇、史国振、张延恒、邝坚、宋荆洲、廖启征 |
2007 |
中国人民解放军科学技术进步奖二等奖 |
4 |
高效节能浮头式换热器施工图设计软件包开发 |
徐晓慧(2) |
2008 |
盘锦市人民政府科学技术奖一等奖 |
5 |
具有柔性变址功能的分拣机网络管理控制系统 |
周晓光(1) |
2006 |
2006年中国物流与采购联合会科技发明三等奖 |
6 |
光缆机械性能试验系统Ⅵ型机 |
林中(1) |
2005 |
中国技术市场协会金桥奖优秀项目奖 |
7 |
系列装卸过桥 |
廖启征(1) |
2004 |
2003年全国物流采购联合会科学技术进步三等奖 |
8 |
中国人民解放军总装备部的国家首次载人航天成功贡献奖 |
孙汉旭(1) |
2003 |
国家首次载人航天成功贡献奖 |
9 |
智能型总线式报刊分 发数据显示系统 |
周晓光(2) |
2003 |
2003年第十四届全国发明展览会银奖 |
10 |
大气污染环境下微动 电接触故障机理及降 低故障途径 |
章继高、许良军、周怡琳、林雪燕 |
2003 |
中国电子学会电子信息科学技术奖三等奖 |
11 |
智能化检测控制型机器人自动包装系统 |
李金泉(8) |
2010 |
教育部优秀科技成果奖 |
12 |
吸波涂料智能喷涂技术研究及应用 |
李金泉(8) |
2013 |
中航工业集团科学技术奖二等奖 |
表4.3机械工程专业相关教师在2000~2013年之间的获奖信息一览表
五.稳步发展阶段
2014年自动化学院领导班子换届,刘晓平老师担任院长,孙汉旭老师担任书记,不久后马启华老师担任书记,贾庆轩老师和魏世民老师担任副院长,张毅瑾老师担任副书记,肖波老师任副院长。后来自动化学院领导发生了多次变动,武穆青老师任院长,魏世民老师任副院长,宁连举老师任副院长,白梅老师任书记,李梅峰老师任副书记。
2014自动化学院领导换届后,李金泉老师由机电工程教研中心常务副主任接任主任,陈钢老师担任支部书记,2018年7月严鲁涛老师担任中心主任,2019年李端玲担任专业负责人。
2020年,自动化学院拆分,现代邮政学院变为现代邮政学院(自动化学院),机械工程专业转入现代邮政学院(自动化学院),2021年,张英老师担任中心支部书记。
5.1.师资建设
经过了自动化学院前期多个专业筹建时对机械工程教师的抽调之后,机电工程教研中心的师资建设逐渐走向正轨,从2015年开始逐渐加强引进师资力量,截止到2022年8月,专任教师人数达到了30多人,新进教师全部具有博士学位,大多数具有海外经历。
5.2.教学方面
考虑招生就业等因素,将原先偏向机械电子的培养方案逐步转向以机器人为特色的培养体系,从2018版培养方案开始,课程体系注重以机器人为代表的智能装备研发,考虑从智能装备单机控制系统的软硬件开发、机械结构的设计到车间、工厂的系统化设计,后续版本的培养方案,考虑专业认证的要求,在此基础上进行了进一步的修改、完善和提高。
2014年,实施了2014年教育部“本科教学工程”项目,强化了实践教学,推行了“+1”课群建设,重点加强了6门课程的实践教学。2014年与青岛宝佳自动化设备有限公司、2015年与北京亨通斯博通讯科技有限公司签署了产学研合作协议。
2016年,通过了学校的专业自评估,2018年机械工程专业通过了教育部的合格评估。
这期间,关于教学的各项成绩初步统计如下:教改项目如表5.1/5.2/5.3所示。
表5.1 国家级教学改革项目
序号 |
年份 |
项目名称 |
项目负责人 |
1 |
2016年 |
基于大数据处理的智能学习系统的研究与实践 (全国教育科学“十二五”规划2015年度课题) |
徐晓慧 |
2 |
2016年 |
面向工业4.0的多学科融合智能制造综合实验平台建设(一期)(教育部教改专项) |
李金泉 |
3 |
2015年 |
机械工程专业2015年教育部本科教学工程项目 |
贾庆轩 |
表5.2北京市教学改革项目
序号 |
年份 |
项目名称 |
项目负责人 |
1 |
2016年 |
面向“互联网+”与“中国制造2025”复合型拔尖创新人才培养综合改革研究与实践 |
刘晓平 |
表5.3校级教学改革项目
序号 |
年份 |
项目名称 |
项目负责人 |
1 |
2021年 |
“三全六融”机器人方向双创教育体系的构建与实践 |
李端玲 |
2 |
2021年 |
基于新工科教育理念的机械制造综合实训综合建设 |
李金泉 |
3 |
2020年 |
大学生创新训练项目的学生团队管理研究 |
苏柏泉 |
4 |
2020年 |
基于 OBE 理念的机械制造课程思政建 设 |
李端玲 |
5 |
2019年 |
基于“工程设计思维”的递进式机械工程 专业建设 |
武穆青 |
6 |
2019年 |
机器人工程导论 |
王刚 |
7 |
2018年 |
智慧物流机器人开放性实验 |
魏世民 |
8 |
2018年 |
面向创新能力培养的机械原理课程设计 STEP教学模式的研究和实践 |
张英 |
9 |
2017年 |
基于数字化教学平台的机械制造类课程翻转教学研究 |
李端玲 |
10 |
2017年 |
新工科多方协同育人模式改革与实践 |
刘晓平 |
11 |
2015年 |
机械制造类课程数字化教学平台建设方案研究——一体化教、学、练、测、评体系的搭建 |
李端玲 |
12 |
2015年 |
计算机图形学个性化虚拟实践平台的开发与应用 |
徐晓慧 |
13 |
2015年 |
面向“互联网+”与“中国制造2025”复合型拔尖创新人才培养综合改革研究与实践 |
刘晓平 |
14 |
2015年 |
面向工业4.0的多学科融合智能制造综合实验平台设计 |
魏世民 |
15 |
2014年 |
基于协同虚拟环境的机械类课程立体化教学实验实践平台的研究与实践 |
徐晓慧 |
16 |
2013年 |
基于VERICUT桌面训练的机械制造课程设计模式 |
李端玲 |
17 |
2012年 |
材料力学三段式映射教学研究与改革 |
贾庆轩 |
18 |
2011年 |
基于科研的机械创新设计启发式工程案例教学研究 |
魏世民 |
机械工程专业的精品课如表5.4所示,共有3门。
表5.4精品课统计
序号
|
课程名称
|
精品课级别
|
批准年份
|
1
|
工程图学
|
北京市级
|
2009
|
2
|
理论力学
|
校级
|
2011
|
3
|
机械原理
|
校级
|
2004
|
机械工程专业获得各种教学成果相关奖项如表5.5所示。
表5.5 教学相关奖项
序号 |
年份 |
名称 |
所获奖项 |
组织单位 |
教师姓名 |
1 |
2018年 |
面向互联网+与中国制造2025复合型拔尖人才综合改革研究与实践 |
北京市高等教育教学成果二等奖 |
北京市教委 |
刘晓平、任维政、陈士燕、魏世民、苑春荟、李金泉、韦凌云 |
2 |
2017年 |
面向互联网+与中国制造2025复合型拔尖人才综合改革研究与实践 |
教学成果一等奖 |
北京邮电大学 |
刘晓平、任维政、陈士燕、魏世民、苑春荟、李金泉、韦凌云 |
3 |
2013年 |
搭建创新实践活动平台,培养拔尖创新人才模式的研究与实践 |
北京市教学成果奖二等奖 |
北京市教委 |
刘晓平;郭莉;任维政;韩玉芬;李忠庆 |
4 |
2013年 |
首届全国高校微课教学比赛 |
全国三等奖 |
|
徐晓慧 |
5 |
2011年 |
北京邮电大学青年教师比赛 |
二等奖 |
北京邮电大学 |
张恒文 |
教师获得的教学相关荣誉如表5.6所示。
表5.6 教学相关荣誉称号
序号 |
年份 |
名称 |
所获奖项 |
组织单位 |
教师姓名 |
1 |
2022年 |
|
优秀教师 |
北京邮电大学 |
庄玉锋 |
2 |
2019年 |
|
优秀研究生育人导师 |
北京邮电大学 |
李金泉 |
3 |
2018年 |
|
师德标兵 |
北京邮电大学 |
李金泉 |
4 |
2017年 |
|
爱心使者 |
北京邮电大学 |
李金泉 |
5 |
2018年 |
|
优秀研究生育人导师 |
北京邮电大学 |
徐晓慧 |
6 |
2016年 |
|
教学名师 |
北京邮电大学 |
贾庆轩 |
7 |
2015年 |
|
移动奖教金奖 |
北京邮电大学 |
徐晓慧 |
8 |
2014年 |
第三十二届北京学生科技节 |
优秀辅导员 奖 |
北京市教委 |
徐晓慧 |
9 |
2014年 |
|
师德标兵 |
北京邮电大学 |
徐晓慧 |
10 |
2009年 |
|
教学名师 |
北京邮电大学 |
王飞 |
11 |
2008年 |
|
师德标兵 |
北京邮电大学 |
贾庆轩 |
12 |
2004年 |
|
师德标兵 |
北京邮电大学 |
魏世民 |
13 |
|
|
|
|
|
教材及专著如表5.7所示。
表5.7教材与专著
序号 |
书名 |
作者 |
出版时间 |
1 |
空间机器人导论 |
陈钢,梁常春 |
2021 |
2 |
机器人机构运动学 |
张英 |
2020 |
3 |
空间机械臂建模、规划与控制 |
陈钢 |
2019 |
4 |
空间机械臂使用可靠性系统控制理论与优化控制方法 |
谭春林,陈钢 |
2019 |
5 |
柔体机器人的动力学与控制技术 |
褚明 |
2019 |
6 |
《工程图学》第二版 |
王飞 |
2016 |
7 |
机械电子工程导论 |
李璟湧 |
2015 |
8 |
全方位陆地作业球形机器人 |
孙汉旭,于涛 |
2015 |
9 |
双足步行机器人制造指南 |
李端玲,刘天娇,徐清雪,洪娟 |
2012 |
10 |
码垛机器人机械结构与控制系统设计 |
李金泉,杨向东,付铁 |
2011 |
11 |
电接触理论、应用与技术 |
许良军,芦娜,林雪燕, 孔志刚 |
2010 |
12 |
《机械制造技术基础》 |
侯书林,张建国,雷红,李端玲,郭宏亮,张莉, 刘英超,刘婷婷 |
2012 |
13 |
人机交互设计与评估 |
刘伟,袁修干 |
2008 |
14 |
电接触理论、应用与技术 |
许良军,芦娜,林雪燕, 孔志刚 |
2010 |
15 |
人机界面设计 |
刘伟 |
2011 |
16 |
物联网基础理论与应用 |
李宁,徐连明,邓中亮 |
2012 |
17 |
室内外无线定位与导航 |
邓中亮,余彦培,徐连明,袁协 |
2013 |
5.3学生创新
从自动化学院期间开始,机械工程专业的学生就有着优秀的实践创新传统,目前现代邮政学院建设有北京邮电大学智能机器人创新实践基地;在学校的支持下,成立的智能机器人社团每年吸引200多人加入并开展交流;从2018年开始,在学校的叶培大创新创业学院中设立了智能机器人实验班,从北邮全校大一学生选拔学生进行机器人方向的创新人才培养。
机械专业相关老师组建的大学生机器人队伍先后获得全国大学机器人大赛一等奖、中国机器人大赛一等奖、中国工程机器人大赛暨国际公开赛一等奖、京东机器人挑战赛总决赛金奖、RoboCup公开分项赛一等奖、西门子杯中国智能制造挑战赛一等奖、中国互联网+大学生创新创业大赛银奖、首都高校机械创新大赛一等奖、全国三维数字化创新设计大赛(北京赛区)特等奖等众多优异成绩,受到社会和同行的广泛关注,有效促进了学生在机械领域的动手实践能力。
5.4.学科建设
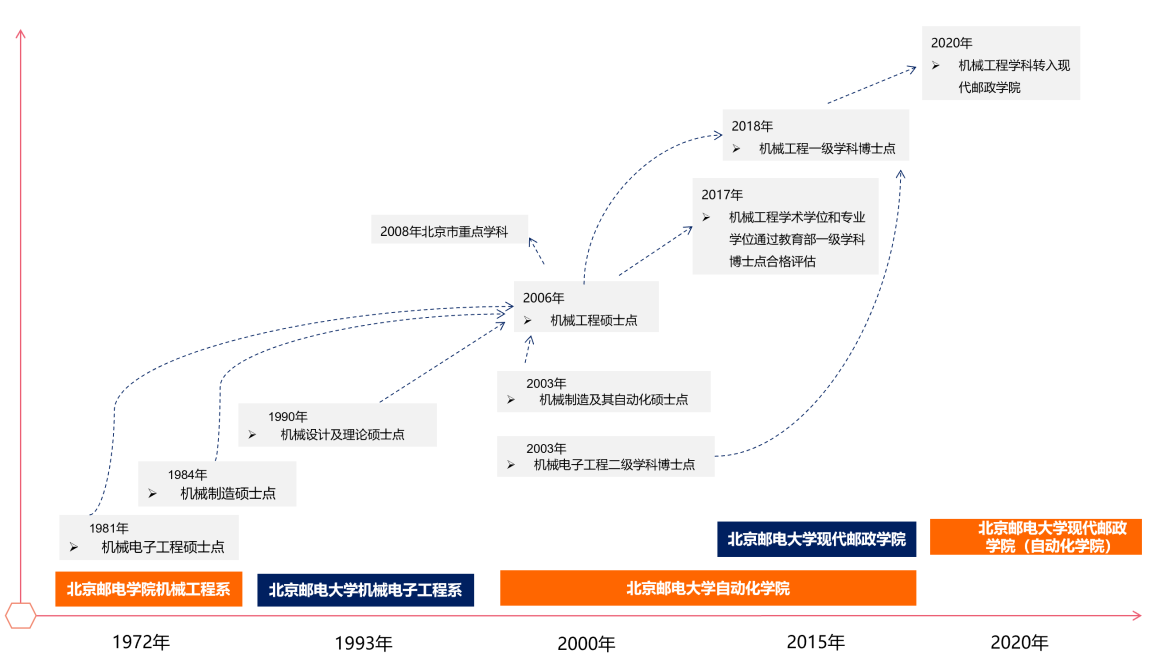
图5.1 北邮机械工程学科发展历程
如图5.1所示,北邮的机械类学科建设始于1981年,1981年获得机械电子工程硕士学位授权点,机械设计及理论于1990年获得硕士学位授权点,机械制造及其自动化于2003年获得硕士学位授权点,到2006年,几个二级学科硕士点升级为一级学科硕士点:机械工程的硕士学位授权点。2008年,机械电子工程获得北京市教委的重点学科。2003年获得机械电子工程二级学科博士学位授权点。机械工程专业学位和学术学位两大类在2017年~2018年初通过了教育部的合格评估,当时虽然一级学科博士点尚未获得,但是合格评估材料是完全按照一级学科博士点的要求进行准备的,评估的标准也是完全按照一级学科博士点的要求进行的,合格评估的通过这意味着当时已经具备了一级学科博士点的实力。2017年,在自动化学院院长刘晓平、副院长魏世民的大力支持和领导下,由机电中心主任牵头组织,众多中青年教师参与,组成了机械工程一级学科博士点申报材料写作班子,最终,在各级领导和众多老师们的努力下,于2018年初获得机械工程一级学科博士点授权点,一级学科博士点的获得标志着北邮机械工程的学科建设走向了一个新的阶段。
机械学科2016年参加了第四轮学科评估,获得了C+,如果单纯从排名上看不高,排到全国70~80名之间,但如果从师资规模上看,当时正处于教师分流到其他专业尚未补充新鲜血液的虚弱期,以当时十五六人在前些年干出的成绩去和平均70、80人的其他高校机械工程学科去PK,能取得这个成绩已是非常难能可贵的了。
这期间,借助教育部的合格评估,学院对机械工程学科的发展方向进行了梳理,明确了学科面向国家和社会的重大需求,依托学校在信息学科领先地位,在空间机器人技术、机构学、机器人学及感知技术、安全生产监测监控与物流自动化技术和机电一体化等方向形成了鲜明特色和学科优势。空间机器人技术方向围绕我国载人航天和深空探测重大工程,在空间舱内机器人技术、空间舱外机器人技术和特种机器人技术研究方面形成了鲜明特色,先后获得全军科技进步二等奖和三等奖;机构学方向在空间机构分析和综合、机械手建模与求解、变胞机构等方面取得了丰富成果,其中空间机构分析和综合的代数求解这一研究方向一直处于国内外领先水平,攻克了被喻为机构学的珠穆郎玛峰问题(Freudenstein,1972)“空间7R机构的位移分析”,先后获得国家教委科技进步一等奖、国家自然科学四等奖和国家教委科技进步三等奖;机器人学及感知技术围绕机器人运动学和动力学建模、任务规划、路径规划、智能感知与场景重建等技术开展了深入研究,实现了多分支机器人通用运动学和动力学模型建立与实时重构、基于资源优化配置的复杂工况条件下机器人智能决策、关节故障条件下机器人模型重构与容错控制、多传感器信息融合与非结构化环境的场景恢复与重建,研究成果应用于多项国家重大工程中;安全生产监测监控与物流自动化技术结合实际生产过程中的安全问题,主要围绕设备安全状态检测、监测与故障诊断技术以及物流自动化技术与装备进行了研究开发,研究成果在煤矿、药品质量监督及实验教学等领域得到应用,取得显著的社会和经济效益;机电一体化方向依托学校在信息学科领先地位,将信息技术、自动化技术和制造技术相融合,在机电产品数字化设计与制造、人机工程、以及监测控制网与管理信息网信息化融合方向形成特色。
5.5.平台建设
机械工程专业现建有科研、产学研等多个平台,如表5.7所示。
表5.7 机械工程专业的科研、产学研等平台
名称 |
批准部门或 合作单位 |
批准时间 |
空间机器人技术教育部重点实验室(B) |
教育部 |
2008 |
空间机器人技术教育部工程研究中心 |
教育部 |
2007 |
北京市邮政智能装备工程技术研究中心 |
北京市科委/邮政科学研究规划院 |
2017 |
机器人与无人技术邮政行业技术研发中心 |
国家邮政局 |
2019 |
绿色包装技术邮政行业技术研发中心(合作) |
国家邮政局 |
2019 |
北京市城市安全生产综合监管工程技术研究中心(合作) |
北京市科委 |
2011 |
安全生产智能监控北京市重点实验室 |
北京市科委 |
2010 |
电信测试实验室(原名:电接触检测实验室) |
国家认监委 |
1994 |
北京市机电工程实验教学中心 |
北京市教委 |
2008 |
校内实训实践基地 |
北邮华飞研究所 |
2003 |
校外产学研联合培养基地、实训实践基地
|
邮政科学研究规划院 |
2016 |
中国空间技术研究院北京空间飞行器总体部 |
2013 |
洛阳东方企业管理有限公司实习接待中心 |
2015 |
北京市报刊发行局 |
2006 |
普天物流技术有限公司 |
2008 |
北京亨通斯博通讯科技有限公司 |
2015 |
青岛宝佳自动化设备有限公司 |
2014 |
5.6 科研方面
(说明:由方维老师对机械工程专业近20年来的科研情情况进行了较为详细的统计和分析,限于条件,仅能做到针对系统中已有的资料,有些课题(至少前期的课题)因为BM等原因无法统计。)
5.6.1 科研获奖情况
在此期间,科研获奖情况如下:
1. 陈钢老师、孙汉旭老师参与的《长寿命航天机构高可靠设计与服役自保障技术及应用》获得2017年中国机械工业科学技术奖一等奖。
2. 孙汉旭、贾庆轩、宋荆洲、叶平等老师承担的《高强度高刚度碳纤维复合材料空间机械手臂杆研制》获得2014年军队科技进步三等奖。
5.6.2 科研项目情况统计
据不完全统计,机械工程专业近20年来(2001年-2021年)的科研立项数和到账经费情况如表格5.8所示,其中总立项数为414项,总到账金额为12370万元。
表格5.8 2001-2021年机械工程专业科研项目情况统计表
年份 |
项目数量 |
金额(万元) |
项目总数 |
经费总额 (万元) |
纵向 |
横向 |
纵向 |
横向 |
2001 |
3 |
3 |
30 |
97 |
6 |
127 |
2002 |
8 |
6 |
80 |
90 |
14 |
170 |
2003 |
2 |
5 |
22 |
75 |
7 |
97 |
2004 |
5 |
11 |
620 |
117 |
16 |
737 |
2005 |
4 |
6 |
63 |
105 |
10 |
168 |
2006 |
7 |
8 |
283 |
41 |
15 |
324 |
2007 |
9 |
7 |
322 |
145 |
16 |
467 |
2008 |
8 |
6 |
139 |
91 |
14 |
229 |
2009 |
11 |
10 |
230 |
70 |
21 |
299 |
2010 |
11 |
4 |
375 |
85 |
15 |
460 |
2011 |
11 |
9 |
284 |
199 |
20 |
483 |
2012 |
5 |
11 |
301 |
320 |
16 |
621 |
2013 |
13 |
16 |
941 |
463 |
29 |
1404 |
2014 |
4 |
20 |
174 |
426 |
24 |
600 |
2015 |
4 |
8 |
143 |
284 |
12 |
427 |
2016 |
5 |
16 |
93 |
396 |
21 |
488 |
2017 |
13 |
17 |
351 |
281 |
30 |
632 |
2018 |
5 |
17 |
237 |
618 |
22 |
854 |
2019 |
13 |
20 |
601 |
591 |
33 |
1192 |
2020 |
12 |
20 |
474 |
576 |
32 |
1050 |
2021 |
12 |
29 |
648 |
893 |
41 |
1542 |
总额 |
165 |
249 |
6411 |
5960 |
414 |
12370 |
从图5.2所示,近20年来科研项目总立项数目呈稳步上升趋势,在2021年度达到最高的41项。与之对应,科研项目到账金额也在稳步上升中,在2013年达到阶段峰值的1404万后,近五年来又重拾明显上升趋势,从2016年度到账488万稳步上升至2021年度到账的1542万。
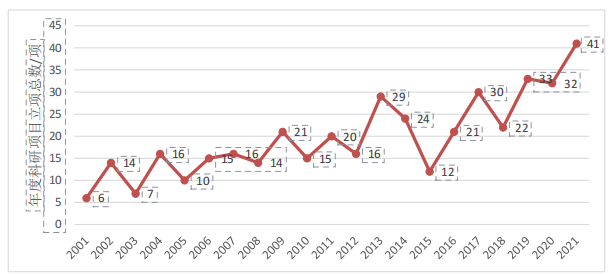
图 5.2 2001-2021年机械工程专业年度科研立项数量
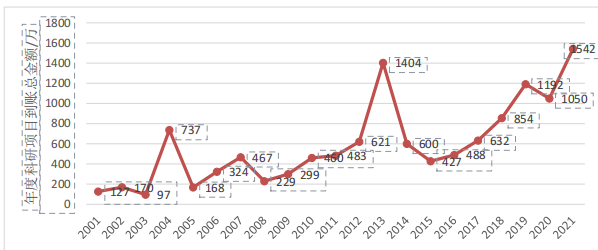
图5.3 2001-2021年机械工程专业年度科研到账金额
(1) 纵向科研情况统计趋势图
从机械工程专业的纵向立项数和到账金额来看(如图 5.4和图5.5所示),纵向项目数量和经费总体趋势均在上升。近5年来年平均立项数超过了10项,且在2013年、2017年和2019年纵向项目数量达到峰值13项。到账经费在2013年出现峰值941万元,后续有一定回落,但近5年来也在稳步上升,其中2021年到账经费648万。
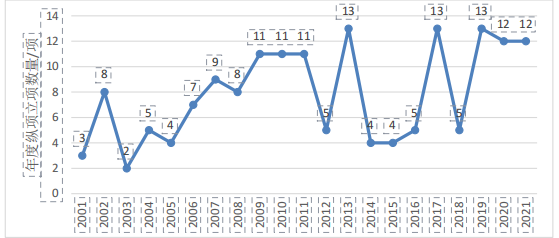
图 5.4 2001-2021年机械工程专业年度纵向课题立项数量
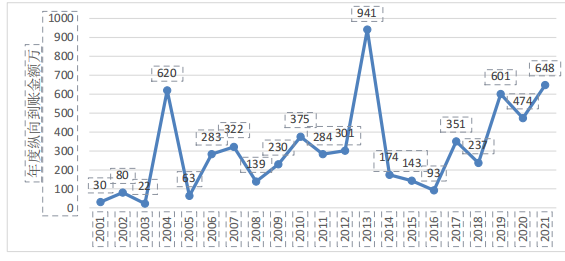
图 5.5 2001-2021年机械工程专业年度纵向课题到账金额
(2)横向科研情况统计趋势图
从机械工程专业的横向立项数和到账金额来看(如图 和图5.7所示),近20年来横向项目数量和到账经费呈明显上升趋势,2001-2021年累积横向立项249项,立项金额共5960万元。近5年来年平均横向立项数超过了20项,期中2021年立项数量达到29项,年度到账金额达到893万。
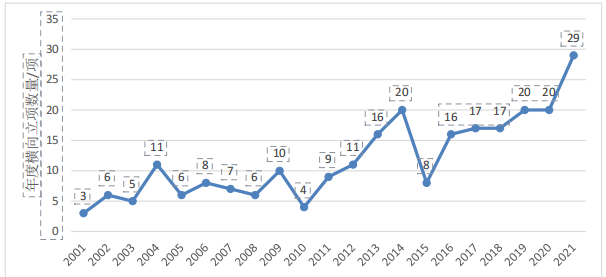
图 5.6 2001-2021年机械工程专业年度横向课题立项数量
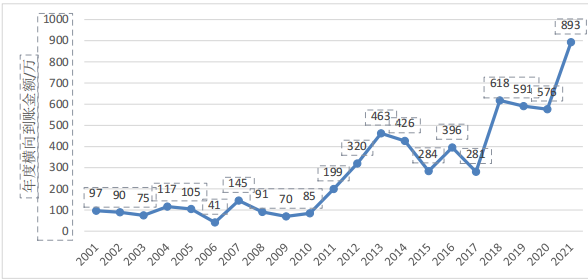
图 5.7 2001-2021年机械工程专业年度横向课题到账金额
5.6.3 科研论文发表情况
机械工程专业科研论文发表情况如表5.9所示,2013年至2021年间,共发表科研论文共计443篇,平均每年约49篇。其中近三年来,发表数量从2019年的39篇快速上升至2021年的65篇。
表 5.9 2013-2021年机械工程专业科研论文发表统计表
年份 |
期刊 |
会议 |
总数 |
2013 |
39 |
17 |
56 |
2014 |
32 |
18 |
50 |
2015 |
24 |
23 |
47 |
2016 |
17 |
23 |
40 |
2017 |
15 |
24 |
39 |
2018 |
32 |
19 |
51 |
2019 |
23 |
16 |
39 |
2020 |
39 |
17 |
56 |
2021 |
42 |
23 |
65 |
合计 |
263 |
180 |
443 |
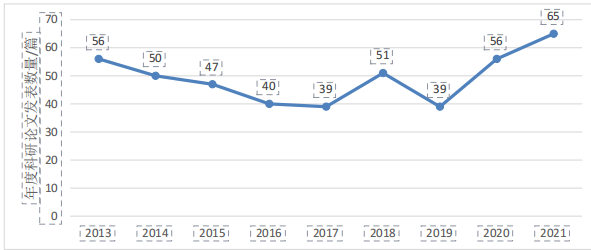
图 5.8 2013-2021年机械工程专业科研论文发表统计表
六.现阶段机械工程学科各科研实验室简介
说明:各个实验室的简介是由各实验室自己提供的资料,由李金泉统稿而成,其中,空间机器人技术教育部重点实验室发展简史是陈钢老师和费廷军博士撰写,空间机器人教育部工程中心发展简史是宋荆洲老师撰写,北京邮电大学机器人实验室发展简史是张英老师撰写,物流自动化技术与监控实验室是刘晓平老师撰写,电接触实验室是孔志刚老师撰写,医疗机器人实验室是苏柏泉老师撰写,智能装备实验室是李金泉老师撰写。
6.1空间机器人技术教育部重点实验室发展简史
空间机器人技术教育部重点实验室(B类)依托北京邮电大学,于2008年5月经国家教育部批准建设,于2013年建成并通过教育部验收。实验室长期从事空间机器人方面的研究工作,以建立空间机器人技术领域具有国际先进、国内领先水平的高层次人才培养,科学研究及工程技术开发的重要基地为目标,开展一系列基础性、战略性、前瞻性、综合性的研究工作。成立至今,已承担并完成国家973计划、863计划、国家自然科学基金、国家科技计划等多项重大科研任务,取得了大量基础理论研究与应用成果。
6.1.1团队负责人与研究团队组成
2008年-2017年是实验室发展的第一阶段,由孙汉旭教授担任实验室主任,由贾庆轩教授担任副主任。期间,实验室共有研究人员58人,其中固定研究人员42人,流动人员16人。固定人员中,教授20人,副教授17人,长江学者特聘教授1人。流动人员包括访问学者、博士后研究人员、客座研究人员。

孙汉旭,教授,博士生导师 主要研究空间机器人技术、移动机器人技术等。 |

贾庆轩,教授,博士生导师 主要研究空间机器人技术、先进机器人技术等。 |
2017年至今是实验室发展的第二阶段,由贾庆轩教授担任实验室主任,由陈钢教授担任副主任。期间,实验室共有研究人员64人,其中固定研究人员48人,流动人员16人。固定人员中,教授20人,副教授20人,讲师8人。流动人员包括访问学者、博士后研究人员、客座研究人员。

陈钢,教授,博士生导师 主要研究机器人智能决策、运动规划与容错控制、模块化机器人技术等,入选国家级人才。 |
6.1.2研究方向与标志性科研成果
空间机器人技术教育部重点实验室自成立以来,紧密结合国家921载人航天工程的重大战略发展需求,围绕在轨服务机器人、深空探测机器人、自由飞行机器人等展开研究。研究期间,积极承担并参与国家航天科研部门主导的各类型号装备的重大横向、纵向协作任务,努力突破项目中所涉及的关键技术与关键理论。自2008年以来,实验室累计承担各类纵向和横向科研项目192项,总经费达9770余万元,其中纵向科研课题104项,经费约3560万元;横向课题88项,经费约6210万元。其中主要包括:
(1)项目名称:国家高技术研究发展计划(863计划)-XXX系统原型样机研制
该项目以研制XXX系统为目标。为此,项目组围绕包括六自由度机械臂、手爪、支撑锁紧机构、中央控制计算机等组件的机械手系统原型样机研制、集成与测试,以及对机械手系统各种关键技术的攻关、验证等方面开展研究工作。
研究成果主要包括:研制了一套包含碳纤维臂杆、中央控制器、机械臂锁紧机构、手爪、一体化双关节等部组件的机械臂原理样机,开发了一套具备容错能力的机械手控制软件,同时设计了机械手自由飞行、自由漂浮状态的机械手运动学、动力学分析、优化等相关算法。本项目的研究成果可以用于空间站的装配、监测和维修,用于进行舱内科学实验的维护和照料;可以代替宇航员的一部分工作,从而减轻宇航员负担,或者在宇航员不在时完全代替宇航员工作。本项目研究成果的应用可以提高我国的航天器使用效率,使航天器在长期无人职守期间能够继续高效地进行空间科学实验和军事应用。
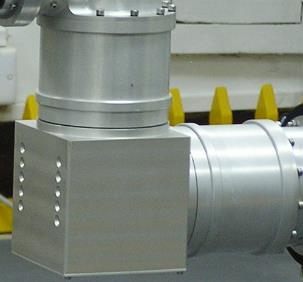
图6.1.1 一体化双关节实物 |

图 6.1.2 碳纤维机械臂臂杆实物 |
(2)项目名称:国家973重大基础理论研究项目—航天机构使用可靠性系统控制基础理论研究
考虑空间环境的复杂性,航天机构长期服役过程中性能退化明显且难以维护维修,航天机构应用过程中故障多发且影响恶劣,如何保持并提升航天机构系统的使用可靠性是航天机构投入太空应用的迫切需求。为此,项目组面向正常状态执行任务代价最小化、非正常状态完成任务概率最大化、服役周期内机构性能衰减最小化这三类任务,开展航天机构使用可靠性系统控制基础理论研究,以提升、保持使用可靠性。
研究成果主要包括:建立一套航天机构使用可靠性系统控制的理论体系,能够实现航天机构长期在轨服役过程中使用可靠性的保持与提升;提出一套能够应用于航天机构使用可靠性系统控制中的控制模型在线重构与切换方法,能够实现航天机构故障的自主处理;综合考虑航天机构使用可靠性和时变动态约束等,提出一套航天机构多约束多准则任务规划方法,能够实现航天机构全寿命周期使用可靠性的保持。本项目的研究成果为航天机构使用可靠性保持及提升奠定了基础,且部分研究已应用于空间站机械臂及探月三期表取采样机械臂的型号研制中,产生了较大的国际影响力。
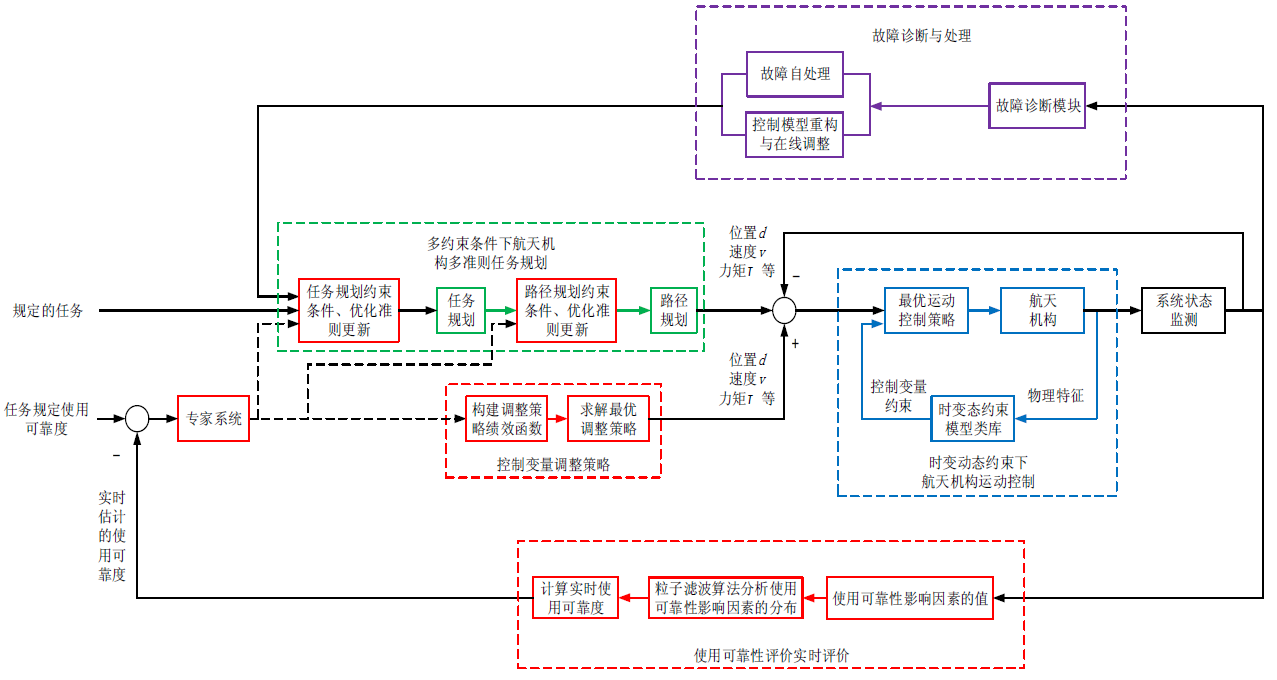
图 6.1.3 基于使用可靠度的空间机械臂使用可靠性控制系统模型
(3)项目名称:探月工程中表取采样机械臂任务规划与仿真技术研究
探月工程分“绕、落、回”三步走,其中探月三期的主要任务是发射嫦娥五号探测器,完成月面取样返回任务。项目组主要承担了嫦娥五号表取任务规划仿真平台的研发以及机械臂相关算法的研究工作。
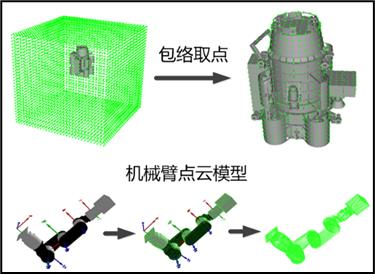
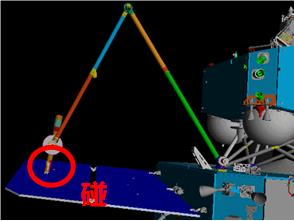
研究成果主要包括:在表取机械臂的路径规划、干涉检测、避障任务规划等理论算法方面取得了关键性突破,其中提出了基于空间几何法的机械臂位置级逆解算法,用于解决四自由度表取采样机械臂运动学逆解效率低下问题;设计了一种碰撞检测技术,以保证表取采样机械臂安全顺利执行复杂操作任务;提出了基于改进A*算法的任务规划方法,在避免发生碰撞与约束超限的前提下优化资源配置;提出了基于柔性误差建模的机械臂精度补偿算法,弥补机械臂因跨度大、具有柔性等原因带来的末端定位精度不足;提出了具备自学习功能的快速避障路径规划方法,使机械臂具备快速躲避障碍物的能力,从而确保采样任务的顺利完成。同时优化了平台的任务调度、数据管理以及网络通信等功能,研制一套了表取采样机械臂规划与仿真软件,可实现无人值守表取采样任务自主规划,使机械臂高精度、高自主完成月壤表取采样任务。本项目的研究成果应用于我国探月三期表采机械臂系统和在轨运控系统的研制中,提升了机械臂的末端操作精度,优化了表取采样等任务的执行效果,并为我国探月计划的顺利开展以及空间机器人从自主走向到高度智能化发展奠定重要基础。
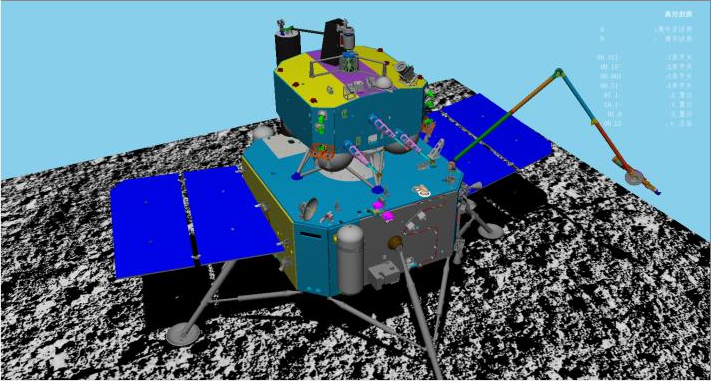
图 6.1.4 嫦娥五号探测器 |
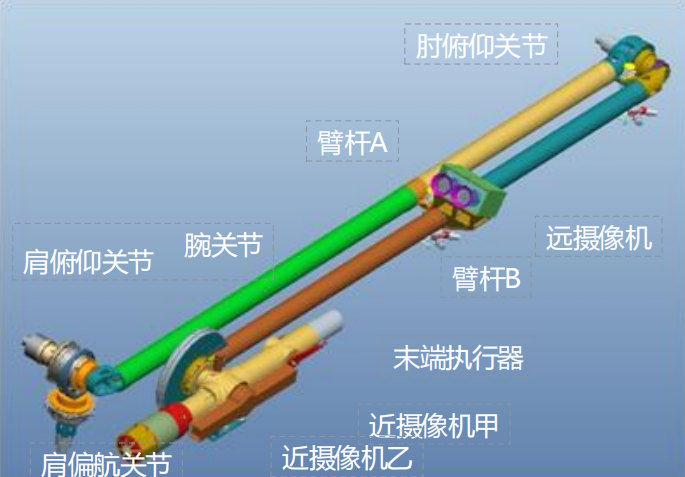
图 6.1.5 表取采样机械臂 |
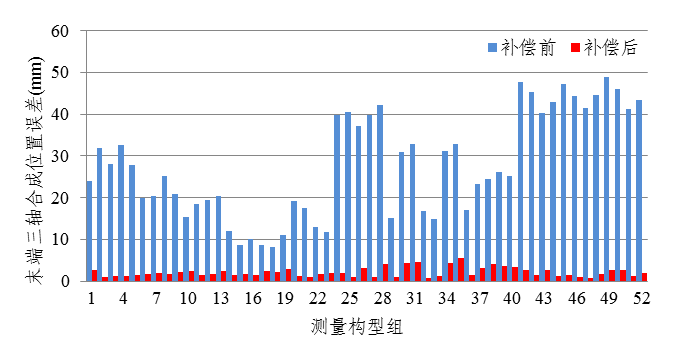
图 6.1.6 补偿前后表取采样机械臂末端定位精度对比图 |

图6.1.7 表取采样机械臂规划与仿真软件界面 |
(4)项目名称:空间站机械臂地面操作系统研制
该项目研究目标:利用空间站机械臂辅助航天员完成空间搭建和载荷维护等任务,将大大降低航天员的出舱风险,减轻航天员的工作压力,提高空间探索活动的效率。项目组主要承担了我国空间站天和核心舱机械臂研制中面临的舱体爬行、舱段组装、悬停飞行器捕获等技术难题攻关工作。
研究成果主要包括:针对机械臂配合空间站长期在轨服役时易发生关节故障的问题,提出了空间站机械臂容错路径规划算法,扩展了机械臂故障情况下任务完成能力;根据太空环境、空间站状态等信息,提出了空间站机械臂任务规划算法,对空间站机械臂大范围移动,如舱段转位和舱位爬行,提供符合任务期望要求的任务规划方案,并以任务中间点的形式给出,以此满足避障、限制关节运动范围等目标,提高了机械臂在不同环境下对各类任务的执行能力和适应性;面向中国空间站机械臂在轨服务的各阶段任务,瞄准在轨操作任务执行过程的预演与仿真要求,研制了空间站机械臂任务仿真验证软件系统,通过在实际任务执行前对任务执行效果进行仿真预演,排除任务失败或机械臂与环境干涉风险,确保任务可靠完成。本项目的研究成果应用于我国空间站机械臂研制,全面提升了机械臂在轨任务作业效率,保障了空间站的建造与运营,并对空间站机械臂的研制和地面遥操作系统的建设提供了有力支撑。
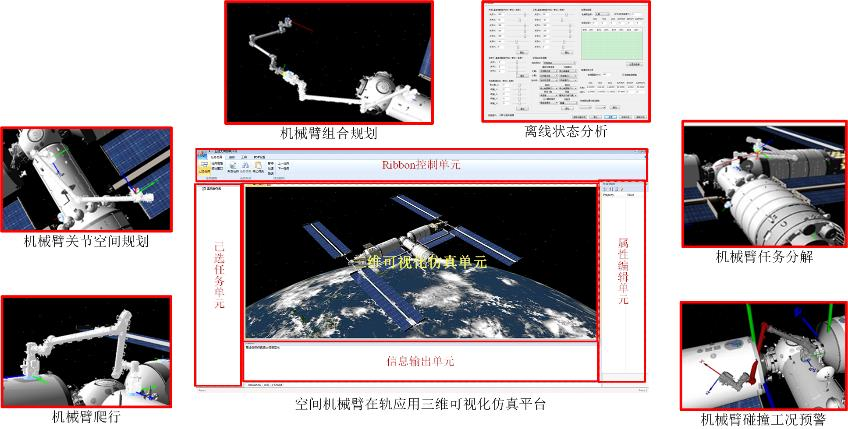
图6.1.8 空间站机械臂任务仿真验证软件系统
此外,实验室还围绕特种机器人、计算机视觉、人工智能、3D光场显示等领域开展了技术攻关工作,突破了一系列关键技术,为实现空间机器人、移动机器人等相关技术应用奠定了重要基础。
6.1.3学生培养与学术成果
空间机器人技术教育部重点实验室不仅是空间机器人技术基础研究和应用基础研究方面一流的实验和研究平台,还是重要的空间机器人技术人才培养基地。自成立来,实验室培养和造就了多名学术领军人才,为国家输送了大批优秀的博士、硕士等国防科技人才,共计博士生38人、硕士生257人。实验室培养的硕博士研究生中,35人获得北京市、校级优秀学位论文。总共输送50余毕业生到航天单位工作,已经成为国内空间机器人技术人才的重要培养基地。
在实验室全体成员的共同努力下,自实验室建立以来,取得了丰富的研究成果。实验室成员共出版专著5部,其中陈钢教授出版《空间机械臂使用可靠性系统控制理论与优化控制方法》、《空间机械臂建模、规划与控制》和《空间机器人导论》三部专著均入选“十三五”国家重点出版物出版规划项目。
此外,实验室成员在《Mechanism and Machine Theory》、《Chinese Journal of Aeronautics》、《Robotics and Computer-Integrated Manufacturing》、《Journalof Guidance, Control, and Dynamics》、《Acta Astronautica》等国内外重要期刊和会议上学术论文832余篇,其中SCI检索184篇,EI检索648篇;已申请国防专利1项、国家发明专利455项、实用新型专利3项、国际发明专利1项;并基于上述学术研究,荣获中国人民解放军科技进步二等奖、中国人民解放军科技进步三等奖、中国机械工业科学技术奖一等奖、中国分析测试协会科学技术奖二等奖等共计5项。

图6.19 获奖证书
图 6.1.10 出版专著
6.1.4代表性硬件设备
伴随着实验室承担与参与越来越多的横向、纵向科研项目,实验室目前拥有多类实验设备,可用于开展空间机器人相关研究,满足各类科研项目的使用需求。主要包括机械臂相关设备(自制机械臂、工业机械臂、灵巧手等)、测量与分析仪器设备(深度视觉传感器、激光跟踪仪等)等。这些设备有力的保障了实验室承担的973、863、国家自然基金等项目的顺利完成。具体介绍如下:
(1)机械臂
实验室现有两条自主设计、研发的六自由度机械臂(如图6.1.13)、七自由度机械臂(如图6.1.14),FRANKA机械臂(如图6.1.11),UR10机械臂(如图6.1.12),可用于机械臂多种地面运动、操作实验的开展,如抓取、搬运、旋拧等。此外,实验室还有由雄克机械臂搭建而成的双臂机器人(如图6.1.15),具有一定的协调操作能力,可用于双臂协调操作任务实验;以及自由漂浮机械臂(如图6.1.16),可用于空间机械臂多种运动任务实验的开展,如大负载操作任务等。

图 6.1.11 FRANKA机械臂 |

图 6.1.12 UR10机械臂 |

图 6.1.13自制六自由度机械臂 |

图 6.1.14自制七自由度机械臂 |
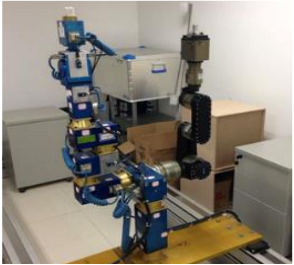
图 6.1.15雄克机械臂 |
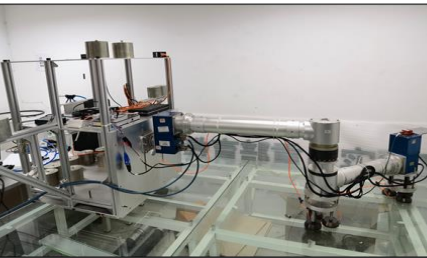
图 6.1.16自由漂浮机器人 |
(2)机械手
如图6.1.17、6.1.18,实验室现有机械手两只(大寰两指手、Robotiq三指灵巧手),可以拾取任何形状的任何物体,常安装在机械臂末端作为执行机构。
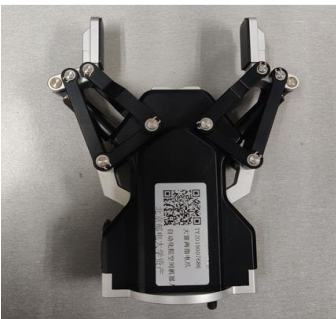
图 6.1.17 大寰两指手 |

图 6.1.18 Robotiq三指灵巧手 |
(3)精密数据采集设备
实验室现有精密数据采集设备包括:激光跟踪仪(如图6.1.19)、激光测距仪(如图6.1.20)。其中,激光跟踪仪具有精确标定、精准测量、实时追踪的特点,用于测量机械臂末端的位姿,为实验收集样本数据;激光测距仪利用激光对目标进行准确测量,反馈对象与目标的距离信息。

图 6.1.19 Leica AT901激光跟踪仪 |

图 6.1.20激光测距仪 |
(4)一般数据测量设备
实验室现有一般数据信息测量设备包括:深度视觉传感器(如图6.1.21)、触觉传感器(如图6.1.22)、六维力传感器(如图6.1.23)、超声传感器(如图6.1.24)。其中,视觉传感器用于获取外部环境的图像信息;触觉传感器用于判断机器臂是否接触到外界物体;六维力传感器用于精确测量机械手x、y、z三个方向的力和力矩;超声传感器通过声音信号检测机器人与障碍物的距离。

图 6.1.21 ZED-2i深度视觉传感器 |

图 6.1.22 uskin触觉传感器 |

图 6.1.23六维力传感器 |

图 6.1.24超声传感器 |
(5)信息处理设备
实验室现有信息处理设备包括:NI数据采集卡(如图6.1.26)、高性能计算机(如图6.1.26)。其中,数据采集卡用于实时储存及处理机械臂状态信息;高性能计算机用于各种实验数据的处理和计算。

图 6.1.25高性能计算机 |

图 6.1.26 NI数据采集卡 |
6.2空间机器人教育部工程中心发展简史
6.2.1空间机器人教育部工程中心概况
空间机器人技术教育部工程研究中心(以下简称“工程中心”)是2007年10月经国家教育部批准,以北京邮电大学作为依托单位,联合中国航天科技集团有限公司第五研究院总体部、中国航天科技集团有限公司第五研究院第五一三研究所(烟台),由高校和科研院所两部分在有形和无形资产上给予重点支撑组建而成的,目前已成为国内外机器人技术领域的知名科研机构之一。
工程中心主任由机器人学领域著名专家、我校孙汉旭教授担任至今。2018年7月,工程中心以优异成绩通过教育部验收。2020年9月,工程中心顺利通过了由教育部组织的2015-2019五年期运行评估。
工程中心的建设与发展支撑“机械工程”和“控制科学与工程”两个一级学科博士点,瞄准空间机器人技术领域科技发展趋势,围绕国家航天工程重大战略发展需求,聚焦空间机器人关键核心技术攻关和工程化应用,开展在轨服务机器人技术、机构设计与系统控制、地面验证与系统仿真、星球探测机器人、星地通讯与精确测距等方向研究,在关键核心技术、工程化应用、成果转化与技术转移三个层次上推进工作,实现了重要的技术创新和突破,形成一批自主知识产权,为我国重大航天工程提供了有力的技术支撑。
同时,成为国内外知名的空间机器人技术创新人才培养基地。目前,工程中心现有固定研究人员近60人,总用房面积6000余平方米,仪器仪表原值3000余万元。
6.2.2重要科研成果
工程中心主要面向航天领域国家重大战略需求,承担了该领域相关的大量国家重大、重点项目,通过核心技术攻关,取了一批重要科研成果,并获得了多项科技奖励。
工程中心获得的主要科技奖励如表6.2.1所示。
表6.2.1 工程中心科技获奖情况
序号 |
编号 |
获奖项目 |
奖励级别 |
完成人 |
获奖时间 |
1 |
2014-J-240-2-01-R01 |
星地融合广域高精度位置服务关键技术 |
国家科学技术进步二等奖 |
刘雯等 |
2014 |
2 |
D1709081-05 |
长寿命航天机构高可靠设计与服役自保障技术及应用 |
中国机械工业科学技术奖一等奖 |
谭春林,于登云,刘日平,孙京,赵阳,张建国,陈钢,潘博,刘育强,韩建超,孙汉旭,魏承,马明臻,吴炳金,徐志成 |
2017 |
3 |
KJ2016-1-04-G01 |
远海位置感知与信息融合传输关键技术 |
中国通信学会科学技术一等奖 |
刘雯,尹露等 |
2016 |
4 |
2016GFJBJ1011-R15 |
遥感卫星十四号 |
国防科学技术奖一等奖 |
高升等 |
2016 |
5 |
2016HTKJB004-15 |
遥感卫星十四号 |
航天集团科学技术进步奖一等奖 |
高升等 |
2016 |
6 |
2015HTJBJ2015 |
超长重载的空间可展收支撑臂研制 |
航天集团科学技术奖二等奖 |
程刚 |
2015 |
7 |
KJ2009-1-11-D02 |
基于同轴电缆的智能宽带通信系统 |
中国电子学会电子信息科学技术奖二等奖 |
韩可等 |
2009 |
8 |
2012-A-1 |
面向三网融合的光载射频接入技术 |
国家广播电影电视总局科技创新奖高新技术研究与开发类一等奖 |
忻向军、石川、秦龑龙、张丽佳、王雷、赵文华、刘博 |
2013 |
9 |
2012-042 |
面向多业务的广覆盖光纤无线融合无源光网络基础理论 |
教育部高等学校科学研究优秀成果奖自然科学类二等奖 |
忻向军、刘德明、张丽佳、刘博、邓磊、张琦、王拥军、马健新、余重秀 |
2013 |
10 |
2016-053 |
基于动态多维变换的高谱效率、高可靠光信号收发基础理论 |
教育部高等学校科学研究优秀成果奖自然科学类二等奖 |
刘博、迟楠、余建军、张琦、忻向军、张丽佳 |
2017 |
11 |
2010EP2009-4 |
XXXX非接触排爆技术研究 |
军队科技进步二等奖 |
孙汉旭,贾庆轩等 |
2010 |
12 |
2014709220148633-1 |
高强度高刚度碳纤维复合材料空间机械手臂杆研制 |
军队科技进步三等奖 |
孙汉旭,贾庆轩,宋荆洲,涂彬,王天成,叶平 |
2014 |
13 |
2017J-2-8-4 |
大芯数、超稳定、弯曲可动光缆关键技术研究及产业化 |
贵州省科学技术进步二等奖 |
林中 |
2017 |
14 |
2007KP2012 |
JK863-2007741003 |
军队科技进步二等奖 |
孙汉旭、贾庆轩、梅涛、叶平、史国振、邵志宇、张延恒、邝坚、宋荆洲、廖启征 |
2007 |
1. 空间机械臂一体化关节
空间机械臂技术是我国航天工程的一项重要关键技术,是完成后续在轨操控任务的重要基础。空间机械臂技术涉及多项关键技术,其中,一体化关节作为一个机、电、热、控高度集成,天地一体化协调统一的空间机电产品,是整个机械臂产品的核心部件,具有很强的技术牵引与带动作用。其中涉及的高精度机械加工,电子器件与芯片,长寿命、高精度空间用轴承,长寿命、高精度空间驱动与测量技术,空间材料及摩擦学,高速大容量数据传输等多个行业以及技术领域的发展。
工程中心开展了空间机械臂一体化关节地面实验样机的研究工作,如图2.2.1所示。在大量的前期工作积累基础上,依托工程中心的五院总体部中试基地开展了空间机械臂一体化关节工程化研究,关键技术涉及交流永磁电机驱动技术、高精度绝对值码盘处理技术、高可靠空间控制电路设计、高可靠总线通信技术、高可靠数据处理系统设计等,并首次采用了一体化热控技术和大负载、高转速润滑等技术,并完成了一体化关节的性能测试和空间环境测试,性能指标达到国外领先水平,具体包括:
l 控制对象:2台交流永磁同步电机;
l 母线供电电压:90V-120V;
l 总线类型:1553B总线;
l 计算性能:32位浮点运算能力60MHz,具备EDAC、软件在线注入、软件实时刷新等功能;
l 传感器类型:旋转变压器、热敏电阻、力矩传感器、到位开关等;
l 控制算法:交流永磁同步电机三闭环控制、关节前馈控制、FPGA定时刷新算法等;
l 关节控制精度:关节定位精度±1.5′、速度控制精度≤0.01°/S;
l 控制器功耗≤19W;负载输出功耗≥300W;重量≤6.5kg。


图6.2.1 空间机械臂一体化关节

图6.2.2 嫦娥五号表采机械臂

图6.2.3 载人航天空间站大型机械臂
工程中心研制的空间机器人一体化关节已经成功应用于载人航天空间站机械臂和嫦娥五号表采机械臂等航天工程项目,如图6.2.5和6.2.6所示,并后继在空间在轨构建、空间碎片清理等在轨服务机械臂项目和空间探测中小型机械臂项目中将会有广泛应用。
2.大型空间机械臂中央控制器
机械臂中央控制器是机械臂系统任务管理分系统单机设备,用于完成机械臂任务规划、数据管理、协调控制等功能,是空间机械臂的通信枢纽与控制中心。它包括高性能处理器、实时操作系统及由调度管理、路径规划、控制等模块构成的应用软件。机械臂中央控制器关键技术涉及双DSP数据交互技术、机械臂路径规划算法、机械臂避障控制检测、高可靠空间控制电路设计、高可靠总线通信、高可靠数据处理系统设计等。
工程中心联合成员单位承担了多项国家863相关技术研究项目,依托工程中心五院五一三所中试基地,完成了机械臂原理样机系统联试和整臂测试,测试过程中设备工作稳定,软硬件配合良好,路径规划和整臂状态正确,路径规划时间由原来的100ms减小到5ms左右,指令存储容量增加到1000条,极大自主控制能力和设备实用性。中央控制器负责控制7个机械臂关节和1个机械手抓,实现路径规划、避障检测、故障诊断,遥操作指令存储量1000条,预编程指令存贮量1000条;空间机械臂三维路径规划时间10ms,机械臂遥测采集频率为1次/500ms;关节控制器遥测采集频率1次/100ms;具备两路独立CAN总线接口,每路可控制CAN总线终端不少于22个。
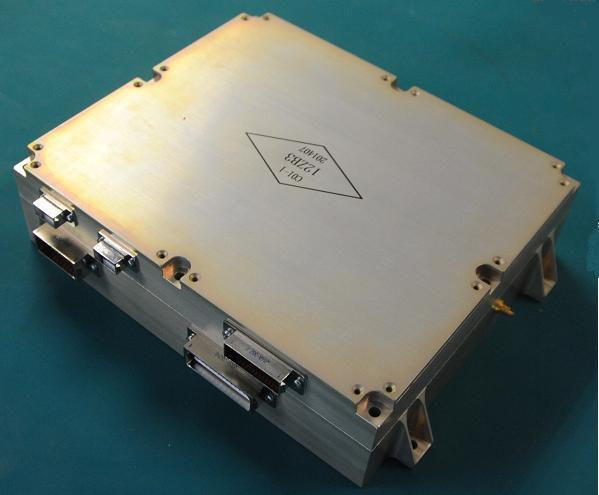
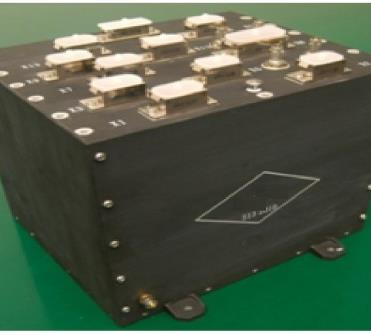
图6.2.4 大型空间机械臂中央控制器
中央控制器集成了机械臂系统任务管理分系统所有控制任务,设备性能指标大幅度提升的同时,设备的重量仅有1.86Kg,功耗仅3.4W,大大节约了系统的重量和系统功耗,节约了发射成本,性能指标处于国内先进水平,相关技术已被后续多个预研及型号任务使用,具有高可靠性和通用性,可适用复杂机构及机器人算法实现和控制,技术产品有广泛应用前景。
3. 采样机械臂中央控制单元及规划控制系统
“探月”工程是我国首次对地球以外星体和空间环境开展的近距离探测,将为我国进行更大范围的深空探测进行技术上的准备。作为关键执行单元,深空探月机械臂系统用于无人条件下月球表面一定区域内多点样品的自动采集,并完成对采集样品密封装置的转移,对我国航天事业的发展具有重大意义。
由中心航天五院总体部牵头,联合北京邮电大学、航天五一三所等单位,工程中心承担了探月三期“某型号采样封装分系统表取采样机械臂”项目。其中,依托单位北京邮电大学2014年1月承担了《表取采样机械臂规划与仿真系统》的研发以及机械臂相关算法的研究工作,并于2015年10月通过了该领域专家组的答辩验收。
采样机械臂缺乏高效的碰撞检测方法,同时现有方法仅考虑刚性机械臂几何参数误差、末端定位精度极低,而且也缺乏采样机械臂遥操作任务中央控制系统及任务仿真验证软件。工程中心克服了月表环境高非结构化环境下机械臂柔性变形带来的末端定位误差建模与补偿困难等挑战,采用低模块耦合中央控制系统及任务规划仿真软件架构设,采用点云模型来离散化复杂曲面从而精确描述整个机械臂外形和环境场景,通过建立点云模型二叉树结构快速遍历算法,实现了采样机械臂的快速碰撞检测;表取采样机械臂的柔性变形极大影响采样任务过程末端操作精度,综合考虑几何参数误差与柔性变形误差,提出了综合误差建模方法及精度补偿技术,通过补偿机械臂末端采样封装绝对定位精度,大幅提升表取采样任务执行精度。研制了采样机械臂遥操作中央控制系统与规划仿真软件,提升了采样任务执行时机械臂与环境间碰撞检测效率及精度。
刚体点云模型效果图
干涉效果展示
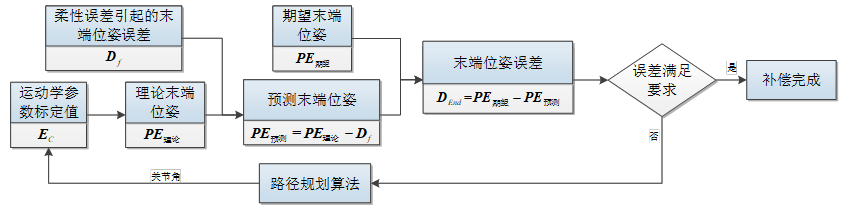
图6.2.5 采样机械臂规划方法与定位精度提升
4.智能消防机器人
随着我国城市化水平的迅猛发展和现代化程度的不断提高,工业水平有了飞速的发展和进步,各种大型石油化工企业的不断增多,使易燃易爆、有毒化学制品的数量急剧增加,由于设备及管理方面的原因,导致化学油品、燃气、毒气泄漏、爆炸等灾害隐患不断增多。一旦事故发生,如果没有有效的救援装备和方法,救援人员将无法进入事故现场,如果贸然采取行动,往往会造成无辜生命的牺牲,付出惨重的代价。因此,研发一种能够代替消防救援人员进入易燃、易爆、有毒、浓烟、易坍塌建筑物等危险环境中执行任务的智能消防机器人,解决消防人员在危险事故现场面临的人身安全、数据采集不足等问题,有着重要的工程实践意义和市场价值。
工程中心受国际五百强企业西门子(中国)研究院委托,经过技术攻关,面向灾备救援的国家和行业需求,完全自主研发了某型600kg级全地形适应能力的智能防爆消防机器人AGV,该消防机器人实现产业化应用。
工程中心通过技术攻关,于2019年9月完成了消防机器人产品的设计与交付、联试工作,2019 年12 月完成1 台初试样机的路演和鉴定级试验,3个月后完成首批量产和产品发布。AGV设计了全新的增强型克里斯蒂悬挂系统,极大改进了重型负载车的减振动力学响应,实现了“三防”——防水(传动系统满足IP67动密封标准)、防(可穿越120度高温区)、防爆( 满足GB3836.2 隔爆设计标准)。

图6.2.6 智能消防机器人
5.爆炸物应急处置机器人智能收放缆系统
北京邮电大学空间机器人工程研究中心受航天三院33所委托,针对军用排爆机器人对于防爆操作的技术要求,开发了一种小型化、可车载的排爆机器人自动收放缆装置。为解放军某部研制了可车载使用的应急处置排爆机器人自动收放缆系统,该系统已经产业化应用。
随着城市建设的迅速发展,城市突发“公共安全”时间时候发生,尤其是涉爆事件,这类事件往往是在爆炸物品生产、经营、储存、运输、使用和废弃爆炸物品处置等过程中突然发生,造成或者可能造成重大人员伤亡、财产损失、生态环境破坏和严重社会危害。爆炸物的形式多种多样,爆炸原因复杂多变,因此目前对于爆炸物的应急处置对人员要求较高,随着机器人技术的不断发展,国内外各涉爆应急处置单位都不约而同将应急处置任务交给了机器人处理,但机器人自身由于体系复杂等原因,造成其防爆安全性很难得到保证,尤其是在易燃物爆炸应急处置现场,要求机器人不能成为二次爆炸的源头。为防止机器人自身原因造成现场二次爆炸,除机器人本体进行防爆处理外,采用有线通信代替无线通信也是重要的防爆技术要求。
本研究创新性的提出线缆卷筒与驱动保护装置一体化设计方案,实现了收放缆机构的小型化、模块化设计;创新性的将收放缆长度测量及张力测量传感器集成于线缆分线器中,实现了集成化设计;采用二级齿轮联动实现了卷筒阻尼的动态加载。卷筒智能化传感器布置,解决了线缆布放时的过放问题,实现了对线缆收放装置的智能保护。
该装置具备与排爆机器人数据通讯能力,可在排爆机器人控制下自动完成通讯线缆的收放,并具备收放缆长度测量、线缆张力检测功能,可在线缆张力超过线缆许用应力值前实现脱钩保护。所研制的移动机器人小型自动收放缆装置已经成功应用于军队某型号排爆机器人,并取得了良好效果。其性能指标如下:
1) 尺寸(长*宽*高):380*400*245(单位mm)
2) 收放缆长度500m,收缆速度1.5m/s
3) 具备长度测量功能,具备极限放缆安全保护功能
4) 传输信号标清视频480P,双向数据传输(485)
5) 重量33kg

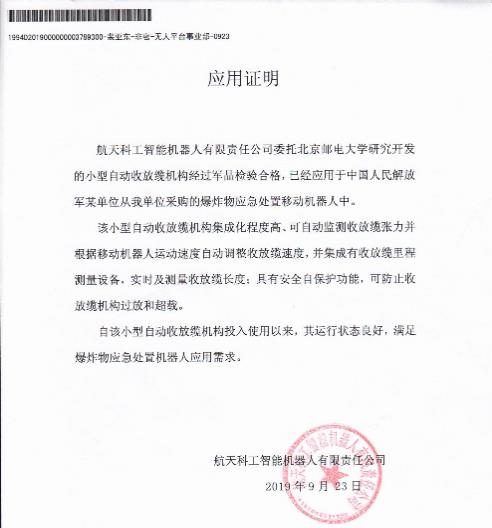
(a)实物样机 (b)应用证明
图6.2.7 小型智能收放缆系统
6.热力管廊巡检机器人
工程研究中心受北京市热力集团委托开发用于地下热力管网的巡检机器人系统,是我国热力行业首次采用移动机器人进行地下管网巡检的机器人系统,极大提高了热力管廊巡检的自动化程度,降低了人工巡检的劳动强度。
随着我国综合国力的快速增长,城市集中供热建设近年来发展迅猛。北方大部分城市都已经建立起大型热电厂,向城市以及其周边地区进行集中供热。以北京市为例,北京市拥有全世界最大的供热系统及供热管网,北京市热力集团是目前全国最大的集中供热企业,担负着全市8座大型热电厂、3座尖峰燃气供热厂和12座自营供热厂热能的生产、输配、运行与管理工作;负责党中央、国务院、驻京部队、各国驻华使馆、国家部委、北京市政府机关、大型宾馆饭店等公共建筑以及居民住宅的采暖、生活热水和部分工业用热。
随着集中供热系统规模的扩大以及运行时间的增长,由于管道磨损、设备老化、化学腐蚀等因素的影响,供热管道故障时有发生,其中以泄漏故障最为常见。其发生的时间和地点大多无规律可循,这对供热管网的运行和维护管理造成极大的影响,严重妨碍了热网运行的经济性与安全性。另外在北方地区,冬季天气十分寒冷,而主要的取暖措施就是暖气,所以热力管道的泄漏不仅造成水资源的浪费,经济的巨大损失,更重要的是给人们的生活带来诸多不便。
随着机器人技术的发展,机器人开始被应用于智能电站巡检、电缆沟巡检、井下救援等领域,为供热管网的在线巡检,提供了一个新的方向。地下供热管网的工作环境恶劣(如高温、无光照、蒸汽、空间小等),机器人巡检的实现难度比较大,工程研究中心通过技术攻关,研制了用于城市热力管网巡检的机器人系统,其技术指标如下:
1) 越障高度:>=90mm;涉水深度:>=90mm;
2) 最高工作温度:130度;最高工作湿度:100%;
3) 连续工作时长:100分钟(环境温度小于60度),热力管沟巡检距离最长200米;
4) 具有图像传输、显示与储存功能;
该机器人是我国首个应用于城市地下热力管网的巡检机器人系统,其其研究成果得到了北京市人力集团的肯定,北京晚报也对本研究的成果进行了报道,目前该项目的工程化应用也正在进一步开展中。

(a) 北京晚报报道 (b)机器人实物
图6.2.8 热力管廊巡检机器人
7.机器人关节性能测试平台
工程中心承担了军口863某型号项目XXX机械手系统双关节性能测试平台研制。该平台由一体化双关节主要性能指标地面测试设备和关节内走线力学性能地面测试设备两部分组成,可用于测试双关节力矩输出特性、角度输出精度、角速度输出特性及关节内部走线干扰力矩、电源功耗测试。
交付使用的空间机械手一体化双关节地面试验样机部分地面测试设备严格按照任务书要求技术指标研制,并在此基础上对一体化双关节地面试验样机进行了关键性能参数的测试工作,测试结果良好,充分证明了该系统具有良好的测试性能,可以满足空间机械手一体化双关节各项指标的测试工作。同时,该测试系统还可以进一步推广应用,能对相同指标要求的同类关节进行性能测试,展示出良好的应用前景。
该平台是我国首台针对双关节特性进行测试的测量设备,该平台服务于该型号项目机械臂关节性能测试任务。
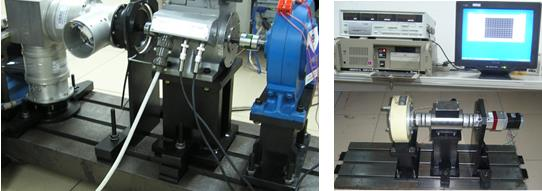
图6.2.9 关节性能测试平台
8.空间舱内服务机器人综合服务系统
在863项目的支持下,面向未来空间站在轨无人值守下的实验载荷照料等任务需求,工程中心成功研制了一套由9自由度(包括一个移动导轨)机械臂系统和视觉定位系统构成的空间舱内机器人地面实验平台。该系统突破了超冗余机械臂的协调操作运动规划、模块化关节及三指自顺应手爪研制等多项关键技术;基于该平台完成了典型的空间舱内实验如试验载荷照料、开关抽屉、按按钮等操作,所积累的技术储备为我国未来空间站运行和维护提供了有力的技术保障。
基于研究成果,工程中心建立了带移动导轨的舱内三分支机器人系统地面实验平台,针对空间舱内机器人从事的典型操作任务,设计了拉抽屉、按按钮、抓取棒料、投放传递物料四项有代表性的实验,实验结果验证了整个舱内机器人地面演示系统的性能。



(a)空间舱内服务机器人

(b)三分支舱内服务机器人协调操作
图6.2.10 空间舱内三分支服务机器人系统地面试验系统
9.空间柔性机器人动力学/控制耦合系统
在教育部重大项目的支持下,针对空间机械臂大跨度、高负载而带来的机械臂柔性问题,工程中心开展了空间机械臂柔性动力学特性的研究工作,取得了重要的研究成果:提出了空间柔性机器人动力学/控制耦合系统理论模型的构建方法,解决了空间柔性机器人的动力学分析问题;采用动力奇异方法研究了空间柔性机器人的运动稳定性问题,提出了保持柔性机器人运动稳定性的有效方法;建立了柔性机器人反馈约束特性分析的解析方法并进行实验论证;提出了利用可控局部自由度形成Rayleigh阻尼和陀螺力以进行振动控制的理论方法,实现了空间柔性机器人残余振动的快速抑制;发展了一种适合在轨实时运动的终端滑模控制算法,解决了空间柔性机器人非最小相位系统的振动鲁棒控制问题。

图6.2.11 空间柔性机械臂控制实验系统
10.地表排爆机器人
基于空间机器人运动导航与控制技术成果,设计并研制了地表XXX排爆机器人样机系统,包括聚能射流发射装置、移动机器人平台、哑弹探测系统、数据链路与安全传输系统等,进行了样机的功能与性能测试,并在在某军工研究所试验场完成了实弹销毁演示验证试验并取得了预期的效果。该机器人系统已交付中国人民解放军总装备部某基地使用。

图6.2.12 排爆机器人
11.基于球形水下机器人的水下观测平台
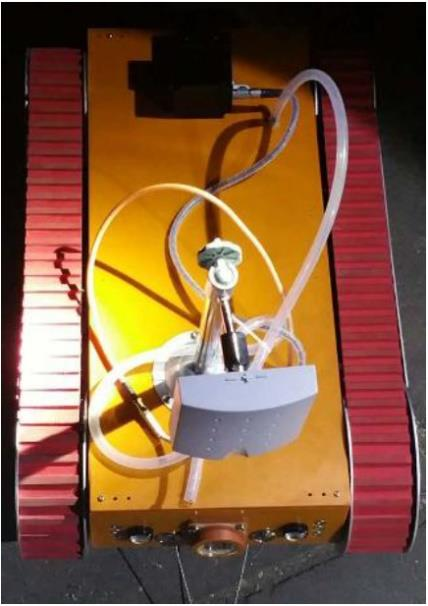
基于球形水下机器人的水下观测平台主要面向水下机器人的性能测试需求。该系统主要包括地面操控监测平台和水下观测平台两部分,其中地面操控监测平台用于操作人员在地面对机器人下达运动指令和监测机器人的运动状态和数据采集结果。水下观测平台通过BYSQ3搭载观测设备潜入水下,运动到任务地点后,按照地面操控监测平台传来的指令执行水下观测任务,将观测结果传回地面。球形机器人的整套水下观测系统的组成如下图所示,机器人的水下环境观测实验如图6.2.20所示。
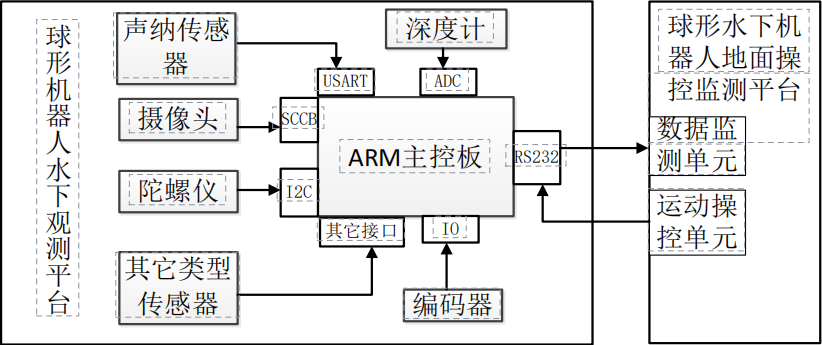
图6.2.13水下观测系统组成


(a) 机器人实验设备 (b) 机器人潜伏水底
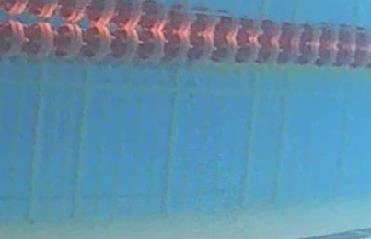

(c)艏角0度观测图片 (d)艏角30度观测图片


(e)艏角为60度观测图片 (f)艏角90度观测图片
图6.2.14 机器人在泳池底部观测图
基于该实验平台可以开展水下机器人观测实验,具备水底测距,障碍物测量,水下机器人定位轨迹跟踪等验证能力,利用该平台支撑了我国水下机器人相关项目的验证,具有重要意义。
12.具有质心径向可变能力的球形机器人
具有质心径向可变能力的球形机器人(BYQ-GS)通过使重摆具备径向位置变化能力,实现球形机器人的质心由球壳下半部分转移到球壳的上半部分。BYQ-GS型球形机器人示意图如下图所示,主要由球壳以及完全包裹在球壳内部的驱动机构两个重要部分组成,驱动机构为核心部分,球壳为运动的最终实现部分,并且起到复杂运动环境下保护驱动机构的作用。
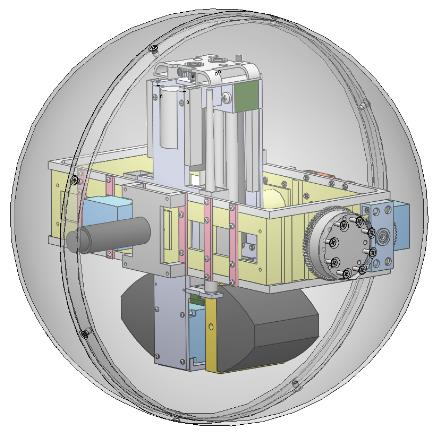
图6.2.15 BYQ-GS型球形机器人示意图
BYQ-GS型球形机器人的驱动机构图如图6.2.22所示。通过垂直安装在主框架上的长轴电机和短轴电机能够驱动配重在球壳内部沿着长轴或短轴方向进行周向转动,进而在两个电机的配合下驱动球壳运动。直线提升系统如图6.2.23所示,其通过支撑架与主框架连接,当重摆位于球壳下半部分且球形机器人处于静止状态时,通过直线提升系统电机与传动机构能够使固定在重摆支架上的重摆沿着直线模组向球壳上半部分移动,且重摆在上升过程中,球形机器人能够由静平衡状态转换为动平衡状态。BYQ-GS型球形机器人通过直线提升系统使重摆具备径向位置变化能力,进而使球形机器人具备重摆驱动模式(模式1)与倒立摆驱动模式(模式2),如图6.2.24所示。
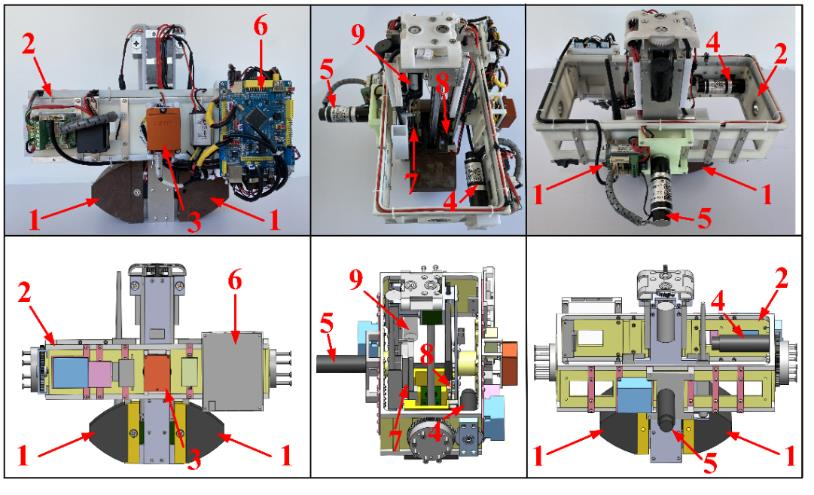
1-重摆 2-主框架 3-惯性航姿测量系统(IMU) 4-长轴电机 5-短轴电机
6-嵌入式控制系统 7-高精度定位测向板卡(RTK) 8-数传电台 9-直线提升电机
图6.2.16 BYQ-GS型球形机器人驱动机构图
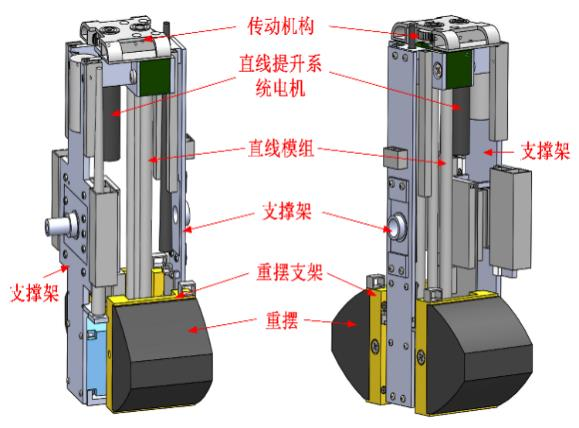
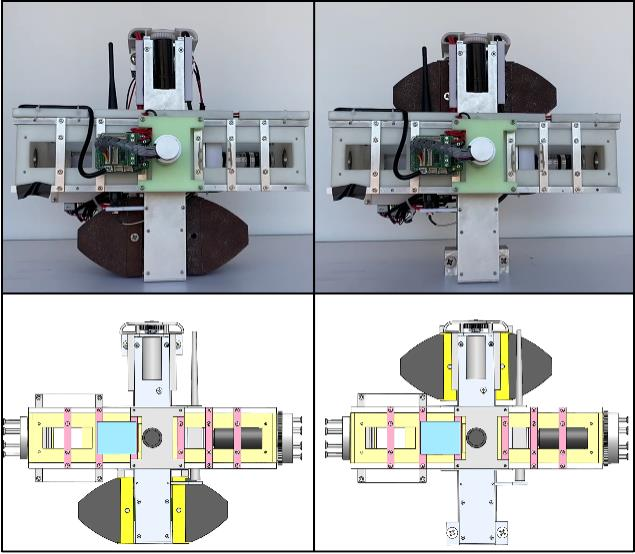
图6.2.17 直线提升系统示意图 图6.2.18两种运行模式时驱动机构状态
BYQ-GS球形机器人系统分为位姿反馈系统、核心控制器、球形机器人本体、通讯系统4个单元。位姿反馈系统包含电机编码器、惯性航姿测量系统(IMU)、高精度定位测向板卡(RTK),采集球形机器人配备的传感器数据,加以解算后得到球形机器人的运动状态信息,包括全局位置、航向、速度、姿态;核心控制器包括一个嵌入式控制系统,接收运动状态信息作为反馈,计算控制量输入球形机器人本体,并将反馈通过通讯系统传回上位控制机实现球形机器人运动状态监控;球形机器人本体通过与控制器并联的长短轴直流无刷电机驱动器接收控制命令,驱动机体进行运动;通讯系统包括串行总线、无线电台,串行总线用于实现控制系统各部分硬件之间的有线连接,无线电台用于球形机器人与上位控制机之间的无线通信。
6.2.3科研经费
自2007年10月经教育部批准建设以来,工程中心通过申请国家科技计划项目、主持和参与航天科研部门航天工程项目、成果转化及社会服务,工程中心每年的科研经费一直处于稳定上升态势,支撑团队取得了卓有成效的研究成果,总体情况如下。
1)工程中心建设期间,(2007.10-2018.7),累计承担各类纵向及横向科研项目461项,合同经费额度总计64894.2万元。
2)在2015-2019五年运行评估期间,工程中心各类项目累计221项,合同经费累计达286605.4万元,其中与地方、行业有深入的合作,成效显著,校企合作项目156项,合同金额8727.4万元。
3)近两年来科研经费情况
2020年,到账经费3086万元,纵向2399万元,横向687万元。
2021年度,到账总经费3289万元,纵向经费2205万元,横向经费1084万元。
6.2.4论文、专著、标准或专利等发表或授权情况
1)论文发表情况
工程中心自创建以来至今,在国内外《Chinese Journal of Aeronautics》、《International Journal of Aerospace Engineering》、《机械工程学报》、《机器人》等航空航天领域及机器人技术领域核心期刊上发表学术论文约1285篇,其中约295篇被SCI收录。
2)专利授权情况
工程中心自创建以来至今,共申请专利600余项,已获授权专利270余项。
3)国家或行业标准制定情况
2015年1月,经国家标准化管理委员会批准,工程中心联合原国家质检总局特种设备局、福建省特种设备检验研究院成立了“全国特种作业机器人标准化工作组”,工作组秘书处由北京邮电大学与福建省特种设备检验研究院共同承担,依托工程中心,北京邮电大学也是国家机器人标准化总体组成员单位。
工程中心依托全国特种作业机器人标准化工作组,制定了包括《特种机器人术语》《特种机器人分类、符号、标志》《地面废墟搜救机器人通用技术条件》《康复训练机器人通用技术条件》等多项国家技术标准,另有23项国家标准建议书已经提交国家标准化管理委员会。
图6.2.19 工程中心依托单位北京邮电大学被授为国家机器人标准化总体组成员单位

图6.2.20 全国特种机器人标准化工作组会议留影(2019年)
工程中心依托工作组积极开展特种机器人领域内机器人标准化工作,先后参与制定并发布了如下国家标准:
1) 《特种机器人术语》 GBT 36239-2018
2) 《特种机器人分类、符号、标志》 GB∕T 36321-2018
3) 《地面废墟搜救机器人通用技术条件》 GB∕T 37703-2019
4) 《运动康复训练机器人通用技术条件》 GB T 37704-2019
5) 《电力机器人术语》 已完成征求意见稿,提交国家标准化委员会审核
其中《特种机器人术语》、《特种机器人 分类、符号、标志》是我国除工业机器人外首个对特种机器人进行规范的标准化文件,是特种机器人领域的纲领性文件,该两个标准文件规范了特种机器人的定义、给出特种机器人涵盖的行业范围、各类特种机器人的定义以及分类,并对特种机器人的符号及标识进行了规范。是我国特种机器人发展过程中的一个里程碑式的标准化文件。必将使我国特种机器人的发展从无序走向规范。
除以上已发布的特种机器人标准外,依托空间机器人工程中心及全国特种作业机器人标准化工作组,目前另有23项国家标准建议书已经提交国家标准化管理委员会,等待标准化委员会批准。
图6.2.21工程中心参与制定的部分特种作业机器人相关标准
6.2.5学生培养
工程中心非常重视人才的培养,积极制定人才培养方案。结合学科研究方向,工程中心积极推进跨学科、跨院系的本科、硕士、博士等人才交流和培养,吸引和培养了一批创新人才和团队。
至工程中心成立以来,共计培养博士后15名左右、博士生90名左右,硕士生1000多人。所培养的硕博士研究生中,1人获得北京市优秀博士论文,5人获得校级优秀博士论文,15人获得校级优秀硕士论文。累计总共输送160余毕业生到军工/航天单位工作,已经成为国内空间机器人技术人才的重要培养基地。输送250名左右毕业生到航天单位工作(年均45人),已经成为国内空间机器人技术人才的重要培养基地。
工程中心目前每年保持博士后和博士生约10人左右、硕士生150人左右的培养规模。
6.2.6重要设备条件平台情况
工程中心成立以来,共新增设备、软件购置等支出总计原值3345.47万元,3365件。围绕工程中心的主要研究方向,工程中心开展了仪器及测量设备、地面模拟试验平台等科研平台的建设,建成拥有了大型气浮式微重力平台、双臂机器人服务系统、9DOF工业机器人系统、UR5机器人、激光跟踪仪、低频相位测量仪、胶带输送机、自动装配系统智能机器人系统、玻璃重量吸附仪、视觉动作跟踪仪、立体测量显微镜、模态测试与振动分析仪、模块化机器人、示波器、六维力传感器、各类VR/AR交互及显示设备、大型环幕显示系统、七自由度协作机械臂、3D打印机、高性能计算服务器等科研和工程化研究设施。同时,先后自主研制了基于B/S架构的空间机械臂仿真训练平台培训系统、新一代协作机械臂智能感知与控制、移动式下肢训练机器人等综合集成实验平台,为空间机器人相关技术的研究提供了有力的实验支撑和技术支持等各种大型实验设备。
代表性的实验平台如下。
1)空间机器人地面微重力运动实验平台
工程中心积极致力于空间机器人地面运动实验平台研发,在参考国内外现有地面平台设计方案的基础上,采用模块化思想,设计并搭建了气浮式地面实验平台。该气浮平台能在平面内模拟空间微重力环境,满足太空微重力环境下的基础实验环境需求,同时,能模拟航天器-空间机器人-负载构成的多体系统,具备动力学参数可调的功能,能适用于不同实验任务。相较于其他地面实验平台,此种平面气浮式空间机器人地面运动实验平台具备技术较成熟、重力补偿彻底、建造周期短、成本低、易于维护、实验时间不受限制、可靠性高、鲁棒性强等优点。
该平台主要由气浮平台、航天器基座模拟分系统、空间机器人分系统、负载模拟分系统、供气系统、中央控制系统及测量系统组成。气浮平台与供气系统为地面运动实验平台提供基础支撑,创造空间微重力环境;航天器基座模拟系统、空间机器人分系统和负载模拟分系统为平台主体,用于空间实验验证;测量系统用于测量实验数据,反馈实验结果;中央控制系统主要协调控制各分系统之间的数据通信、下发任务指令、收集各分系统数据以及完成精确的周期控制。各分系统统一协调,保证空间机器人地面运动实验平台正常稳定运行。该空间机器人地面运动实验平台已应用于多个工程实践领域,如工程研究中心已与装备技术指挥学院联合搭建了空间机械臂地面实验平台,具备良好的实验与教学效果。地面实验平台,能很好地验证空间机器人在轨关键技术的可行性,同时利用该平台能有效地开展实地教学,达到增强人才培训的效果,更好的服务于航天测控、试验指挥、航天装备保障等方向的人才培养。
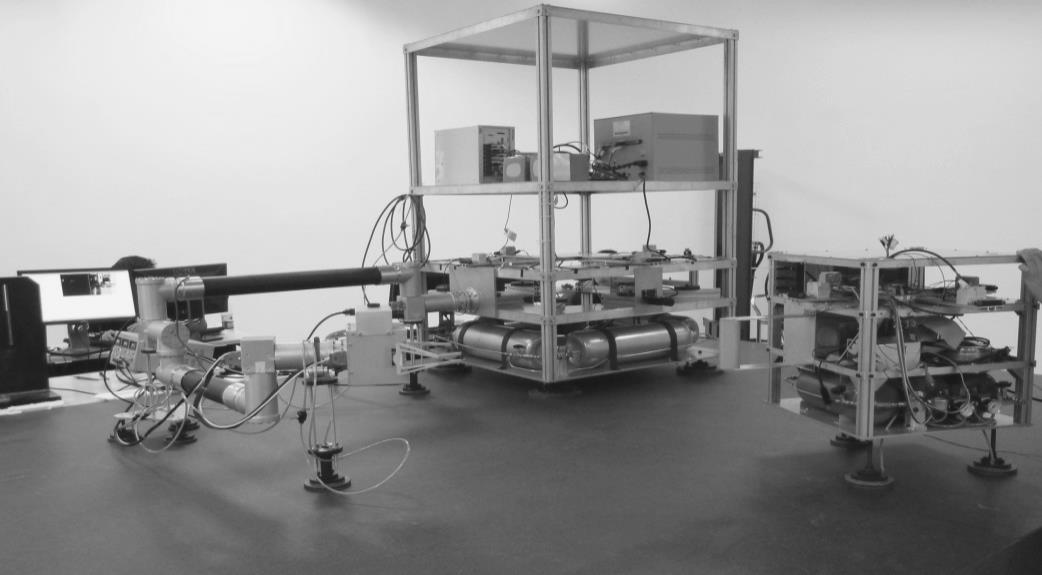
图 6.2.22空间机器人地面运动实验平台
2)空间机械臂关节性能测试平台
空间机械臂关节性能测试平台主要面向空间机械臂关节的性能测试,对迟滞、传动误差、摩擦非线性的参数进行辨识,测试关节各种性能等。关节动态测试实验平台,由关节本体、圆光栅角度传感器、扭矩仪、磁粉制动器及相应的传动轴系组成,关节输出轴首先与扭矩仪相连,圆光栅角度传感器安装于扭矩仪的另一侧,磁粉制动器则位于实验平台的终端,其结构实体如图所示。
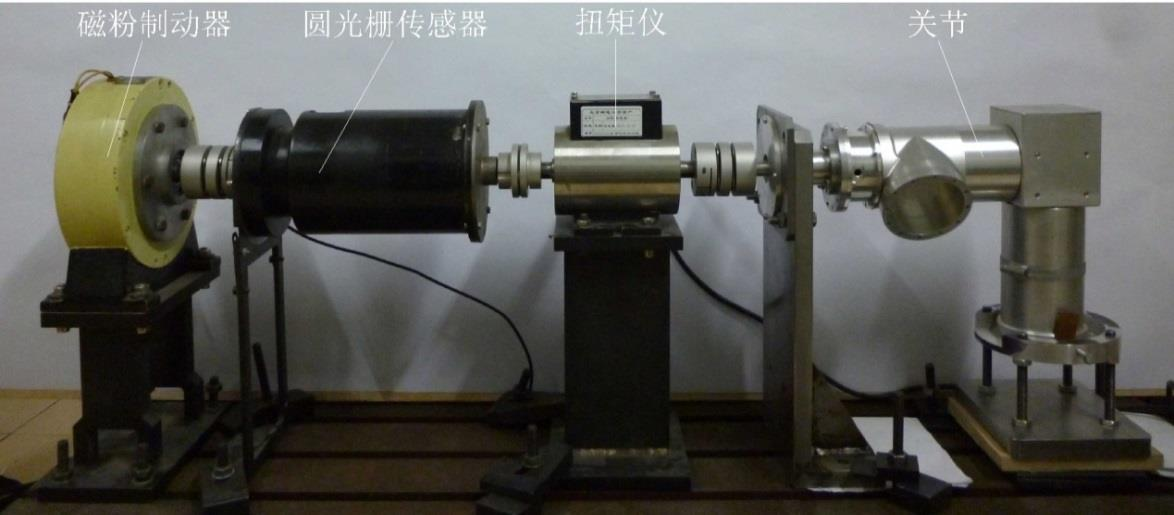
图6.2.23 关节动态测试实验平台
基于该平台可以支撑开展空间机械臂关节性能测试实验,具备关节扭矩传动误差、摩擦非线性等参数辨识能力,利用该平台可以开展空间机械臂关节失效及性能评估等实验工作。
3)空间柔性机器人地面气浮模拟实验平台
空间柔性机器人地面气浮模拟实验平台由空间大柔度双连杆机器人的地面气浮式综合模拟实验平台、柔性关节运动控制与测试平台、基于Turbo-PMAC多轴运动控制器的系统实时运动伺服控制模块等组成,配备了16通道LMS模态测试与分析系统和激光跟踪仪位置测试系统等构成,如下图所示。
该平台可以支撑开展空间柔性机器人的多项典型实验,具体包括:①机械臂运动学轨迹规划②基于PMAC的多轴运动控制软件设计与编程③圆光栅的位置精度测试与标定④利用激光跟踪仪进行机器人笛卡尔空间内的末端位置跟踪测试⑤在LMS模态分析系统上进行大柔度臂杆的锤击法模态试验和运行模态试验⑥利用加速度传感器和电阻应变片测量臂杆弹性振动位移⑦柔性机械臂无残余振动的关节定位控制等。工程中心利用该平台支撑和推动我国航天领域空间机器人技术的快速发展和工程应用,为我国航天战略的顺利实施提供重要的保障。
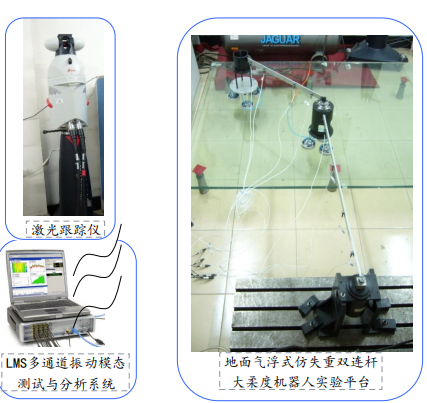
图6.2.24 地面气浮式仿失重双连杆
大柔度机器人实验平台
|
图6.2.29 地面气浮式仿失重双连杆大柔度机器人实验平台
4)其他各种机器人实验平台及其位姿测量仪器
工程中心还拥有开展各类机器人任务规划实验的三分支模块化机器人实验平台、6DOF UR5机器人平台,以及用于测量机器人末端定位精度的激光跟踪仪等测量仪器。

图6.2.25 三分支机器人、UR5机器人、激光跟踪仪
6.3北京邮电大学机器人实验室发展简史
6.3.1实验室的成立时间及历任负责人
北京邮电大学机器人实验室创建于20世纪80年代,原名北京邮电学院机械学研究所,具有丰厚的学科底蕴和沉淀,本实验室主要从事机构学、机器人机构学、机器人部件及系统集成的研发,在机器人机构学领域处于国际国内领先地位。实验室现有教师4人,分别为魏世民教授,黄昔光教授,张英副教授,于秀丽工程师,教师均具有博士学位、海外留学或访问学者等经历。
实验室的历任负责人分别是梁崇高教授、廖启征教授和魏世民教授。
创始人为梁崇高教授(图6.3.1),二级教授,原北京邮电大学校学术委员会委员,中国机械工程学会机械传动学会理事,北京航空航天大学兼职教授,全国机械原理教学研究会副主任委员,华北及北京机械原理教学研究会理事长,国际机器与机构学委员会中国委员会委员。北京市五一劳动奖章获得者,国家级有突出贡献的中青年科技专家,北京市第八届政协委员。梁崇高教授是机器人机构学领域的第一个国家自然科学基金获得者“空间连杆机构的运动及动力分析”(1986年)。


图6.3.1 梁崇高教授 图6.3.2 廖启征教授
第二任负责人是廖启征教授(图6.3.2),二级教授,原北京邮电大学校学术委员会委员,国际机器与机构学委员会中国委员会委员,国际知名机器人及机构学期刊《Journal of Mechanism and Robotics》副主编。享受政府特殊津贴,国家级有突出贡献的中青年科技专家,做出突出贡献的中国博士学位获得者,2019年被授予“庆祝中华人民共和国成立70周年”纪念章。
实验室的现任负责人为魏世民教授(图6.3.3),三级教授,博士生导师,现代邮政学院副院长负责,国际机器理论与机构学联合会委员,中国自动化学会智能制造系统专业委员会委员。

图6.3.3 魏世民教授
6.3.2重要科研成果
机构学国际资深学者、美国哥伦比亚大学教授F. Freudenstein于1973年在《Mechanism and Machine Theory》上发表的综述性论文“机构学的过去、现在和将来”中,把用空间任意方向的7个转动副轴连接的、由7个空间刚性杆组成的七杆机构的位移分析,比喻为机构运动学分析中的“ 珠穆朗玛峰”。
李宏友和廖启征,在实验室创始人梁崇高教授和北京航空航天大学张启先教授的指导下,利用新的矢量法与复数法解决了6R-1P机构的位移分析问题。当论文投到《Mechanism and Machine Theory》时,得到审稿人J. Duffy的高度评价,认为这篇论文是1973年以来机构分析领域中最重要的文章。尤其重要的是,他认为应用这篇论文的新颖方法,有可能解决7R机构,即所谓的珠穆朗玛峰问题。在Duffy教授的鼓舞下,分别用两种方法,伴以投影半角正切定理及混合关系式,导出了7R机构的输入输出位移方程,登上了机构运动分析的珠穆朗玛峰。上述成果,荣获1987年国家教委科技进步奖一等奖(图6.3.4)及1989年国家自然科学奖四等奖(图6.3.5)。后梁崇高教授和廖启征教授又因解决了Stewart并联机器人机构的位置分析问题,获得1996年国家教委科技进步三等奖(图6.3.6)。实验室廖启征教授为广州某公司设计了用于装卸作业的配重式过桥装置,该项成果目前已创造产值数百万,获得国家专利一项,荣获中国物流学会三等奖(图6.3.7)。
图6.3.4 国家教委科技进步一等奖 图6.3.5国家自然科学四等奖
图6.3.6 国家教委科技进步三等奖 图6.3.7 中国物流学会三等奖
6.3.3实验室科研经费以及科研论文发表情况
1)论文发表情况
实验室自创建以来至今,在国内外《Mechanism and Machine Theory》《Journal of Mechanical Design》《Journal of Mechanism and Robotics》《Robotica》《Chinese Journal of Mechanical Engineering》《机械工程学报》《机器人》等机器人机构学和机器人技术领域核心期刊上发表学术论文约300多篇,其中约200余篇被SCI和EI检索。
2)专利授权情况
实验室自创建以来至今,获国家发明专利60余项。实验室发表的专利“一种自动网络配线装置和配线方法”以及“一种基于CLOS交叉矩阵算法的机械式光纤配线系统”于2019年与北京瑞祺皓迪技术股份有限公司进行了专利实施许可,实施许可价格为30万。实验室发表的专利“模块化物流分拣方法”和“基于陀螺进动效应的模块化物流分拣平台及方法”于2021年与宝开(上海)智能物流科技有限公司进行了专利实施许可,实施许可价格为20万,实验室发表的专利“一种少齿差共面双内啮合齿轮及采用其的减速器”于2007年与珠海怡合科技股份有限公司进行了专利实施许可,实施许可价格为10万元。
3)出版专著情况
实验室自创建以来,出版专著5部《平面连杆机构的计算设计》《连杆机构的计算机辅助设计》《Analysis of Spatial Linkages and Robot Mechanisms》《邮政快递技术与装备》和《机器人机构运动学》,见图6.3.8,翻译专著1部《机构和机械手分析》,见图6.3.9。
图 6.3.8.1 图 6.3.8.2
图 6.3.8.3 图 6.3.8.4

图 6.3.8.5 图6.3.9
4)实验室承担部分项目情况
实验室自创建以来,先后完成国家级课题(国家自然科学基金、国家攀登计划、国家973子课题,国家863项目)和省部级(教育部和北京市)课题30余项,横向课题50余项。
实验室在机器人机构学方向主要进行机器人机构运动学的几何建模和代数求解,并在该领域方向形成了自己的特色,处于国际国内领先地位。由于实验室在机器人机构分析代数求解法的研究特色,引起了吴文俊先生的注意,因此,实验室参与了吴文俊先生承担的国家重点基础研究发展计划(973)项目(数学机械化及其在信息技术中的应用)的子项目“数学机械化研究及其应用”和“基于网格的数学机械化软件开发”。
实验室先后承担机器人机构学领域的国家自然科学基金项目有9项,分别为“空间连杆机构的运动及动力分析”(批准号58670121)、“机器人机构及空间机构运动学基本理论研究”、“机器人柔顺装置的几何非线性问题研究”(批准号59475006)、“极轻机构及机器人柔顺装置的灾变分析与综合” (批准号59975010)、“以几何元素点线面构成的广义并联机构”(批准号50475161)、“可重构模块化机器人位置统一逆解建模及通用算法研究”(批准号50775012)、“复杂机构学问题研究的新方法”(批准号50875027)、“基于傅氏级数和代数法的连杆轨迹综合研究”(批准号51375059)和“机构建模及求解的倍矢量与倍矩阵的方法研究”(批准号51605036),其中“空间连杆机构的运动及动力分析”为机器人机构学领域的第一个国家自然科学基金。
实验室在863项目“网络通信专用配线机器人”的资助下,研发的网络通信专用配线机器人,即自动光纤配线机器人AODF(Automatic Optical Distribution Frame),见图6.3.10,解决了目前网络通信配线中唯一没有解决的自动化问题,主要技术有:
• 配线的识别及自动装配技术。它直接关系到机器人配线成功与否的关键。
• 机器人配线的力控制技术。机械手的力度过大对配线口及配线造成破坏;配线力度过小,会造成配线与通信线排端口的虚接,最终影响通信质量,导致信号无法开通。
• 机器人对配线口的自主识别与定位技术。由于通信线排在配线架上的定位精度不高(具有不确定性和随机性),因此如何解决机器人对配线端口的快速准确定位将是配线成功的前提。
该项目通过了科技部组织的专家组验收,目前正在与相关公司开展市场应用和推广。
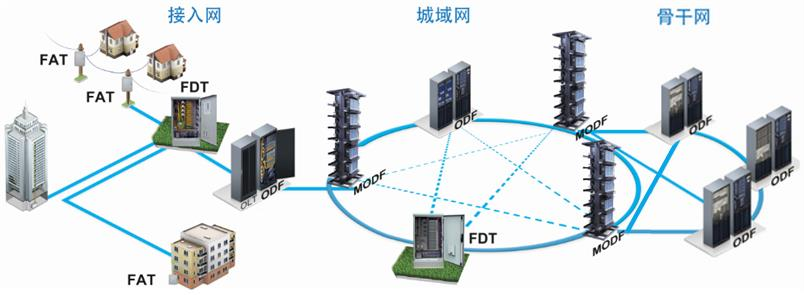
图6.3.10.1 光纤配线架-ODF
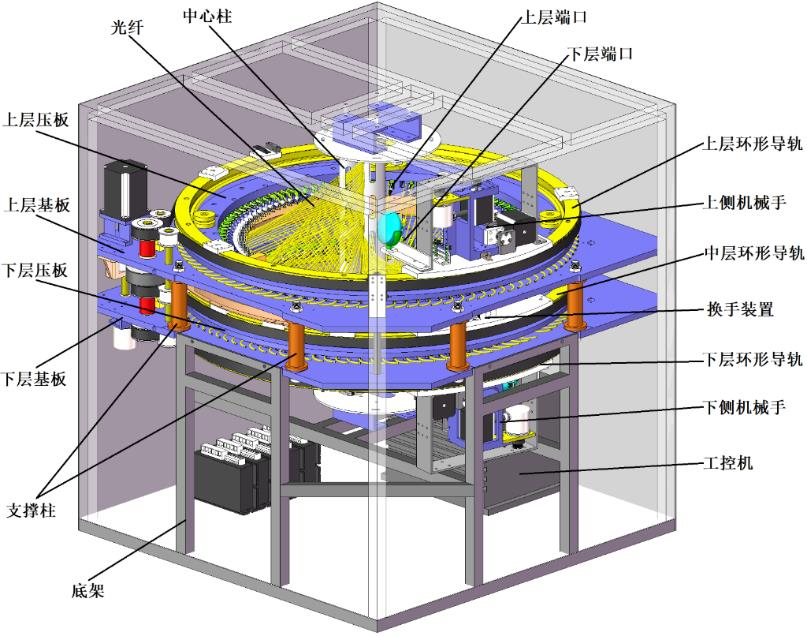
图6.3.10.2 自动光纤配线机器人3D模型
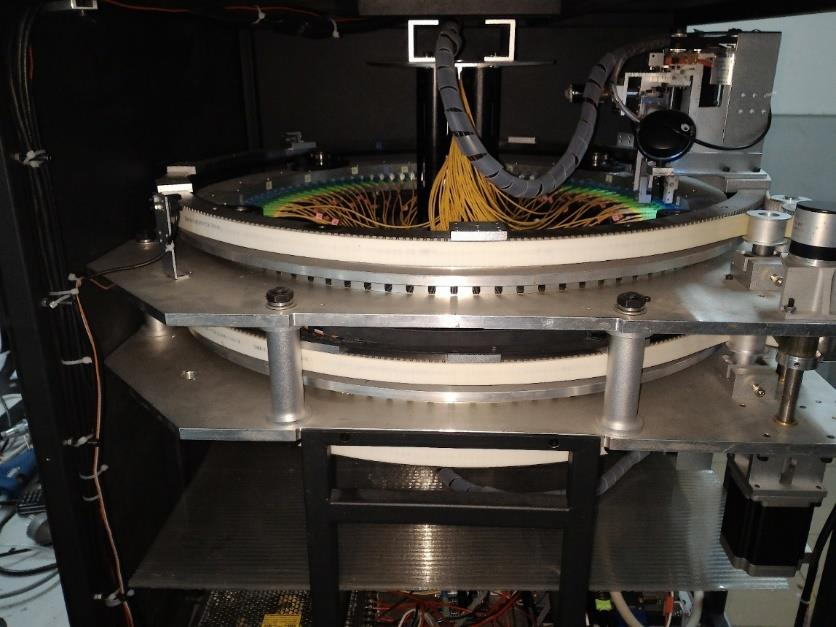
图6.3.10.3 自动光纤配线机器人实物样机
实验室在863项目“高性能比平动式啮合电动机” 的资助下,首次提出了平动式啮合电机运行原理,平动式啮合电机具有集低速、大转矩、高集成度特点,真正意义上将减速器与电机进行了集成。研制了四代平动式啮合电机,见图6.3.11,每一代电机的特点如下:
第一代平动式啮合电机的特点如下:
(a)提出了一种可行的平动电机结构,设计了孔销式平动约束机构和集中式磁极结构,结构简单;问题存在负功磁路和偏心振动
(b)验证了平动电机原理的可行性;
第二代平动式啮合电机的特点如下:
(c)提出了一种轻型平动电机结构,设计了柔性铰链式平动约束机构和分布式磁极结构,结构集成度高;
(d)制作了多种材料和形式的柔性支撑机构及相应样机。
第三代平动式啮合电机
(e)提出了一种三相滑块约束式平动电机结构,设计了三相滑块平动约束机构和磁极结构;
(f)性能较第二代平动电机有所提升。
第四代平动式啮合电机
(g)提出了一种双转子平动电机结构,设计了偏心轴平动约束机构和双转子磁极结构,较好地克服了振动问题,并提高了性能;
(h)达到了样机性能指标要求。
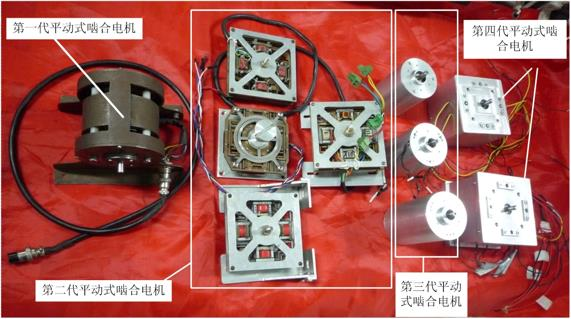
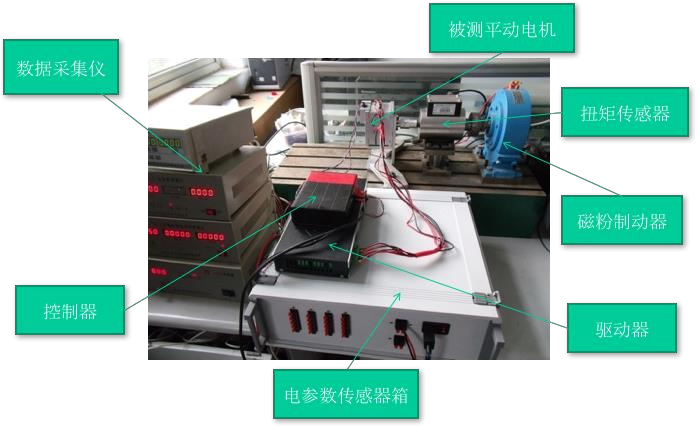
图 6.3.11 平动式啮合电机及其试验平台
6.3.4学生培养
至实验室成立以来,共计培养博士研究生40余名,硕士生300多人。很多优秀的博士生和硕士生毕业后继续从事着机器人机构学和机器人技术的相关研究领域,如:苏海军教授(美国俄亥俄州立大学教授,1998届硕士生)、黄昔光教授(原北方工业大学教授,现北京邮电大学教授,2008届博士生)、郭磊副教授(北京邮电大学副教授,2007届博士生)、黄用华教授(桂林电子科技大学,2011届博士生)、张英副教授(北京邮电大学副教授,2015届博士生)、甘东明助理教授(美国普渡大学助理教授,2009届博士生)、于秀丽(北京邮电大学工程师,2010届博士生)、宋原(北京邮电大学工程师,2014届博士生)和周利锋(美国纽约布法罗分校博士后,2012届硕士生)等。
实验中心目前有在读博士研究生10余人,硕士研究生30余人。
6.3.5 对外交流方面
在对外交流方面,实验室先后与美国、英国、德国、意大利等国家和地区建立了学术交流与合作关系。实验室老师先后赴英国、美国和日本等进行交流访问学习。1992年2月到1993年2月廖启征赴英国伦敦国王学院做高级访问学者。1997 年4月到10月廖启征担任高级访问学者,前往美国加州大学尔湾分校进行交流学习并参加ASME(美国机械工程师协会)国际会议。2012-2014年张英赴美国俄亥俄州立大学进行博士联合培养。
6.4 物流自动化技术与监测监控实验室、测控技术与动态设计实验室简介
研究方向:机器人技术与监测监控
团队成员:教授1人、副教授2人、讲师1人、师资博士后1人,在读博士生和硕士生30余人。
负责人简介:刘晓平教授:1984年8月至1994年3月年在天津大学机械工程系攻读学士、硕士、博士学位,获工学博士学位;1994年3月在北京邮电大学工作至今。在北邮早期从事机械系统动力学、系统辨识、振动主动控制技术等研究,在前期理论方法研究基础上,随后开展机器人技术与系统研发、无损探伤检测技术与监测监控系统研发、快件识别分拣技术及其安全检测技术方法研究等。1998年9月至1999年9月在美国华盛顿大学(西雅图)机械工程系、南加利福尼亚大学航空航天与机械工程系作访问学者。目前兼任教育部高校物流管理与工程类专业教学指导委员会委员、交通运输部专家委员会委员、中国振动工程学会机械动力学专委会副主任、《北京邮电大学学报》编委、《电子机械工程》编委、邮政行业机器人与无人技术研发中心主任等。
主要研究方向:物流自动化技术装备、机器人技术、安全生产监测监控,机械振动与故障诊断、无线传感网络、无损探伤检测技术、机械系统动力学与系统辨识等领域开展技术研究与开发工作。
主要项目:先后承担国家863项目、澳门大学合作项目、国家重点研发计划项目、国家邮政局项目、教育部和北京市科研项目、企业合作项目等。
主要成果:
1、研制钢丝绳在线安全监测仪器系统,研究基于漏磁检测的钢丝绳无损探伤检测方法;
2、研制自动导引运输车(AGV),研究轨迹规划与定位导航技术算法、多机协作技术,开发调度规划系统;
3、开发基于机器视觉的移动机械臂快件拣选系统,研究基于机器视觉和深度学习的快件识别与机器人拣选位姿定位技术方法;
4、研究基于X光、多传感器信息融合的邮件快件安全检测技术方法;
5、研发寄递数据离线分析预测技术与系统、安全监管积压爆仓预警预测预控技术;
6、研究快递物流资源共享多主体博弈动态定价技术与利益分配策略,开发相应动态定价功能模块系统。

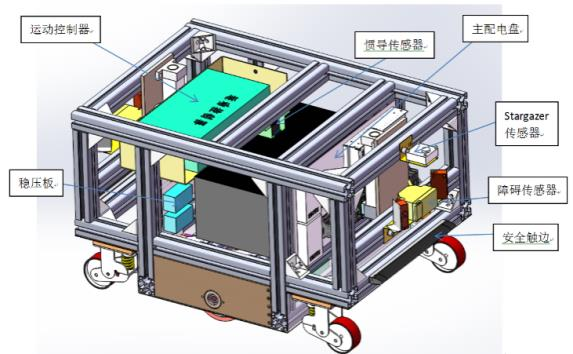
6.4.1码垛机器人 6.4.2自主开发的AGV
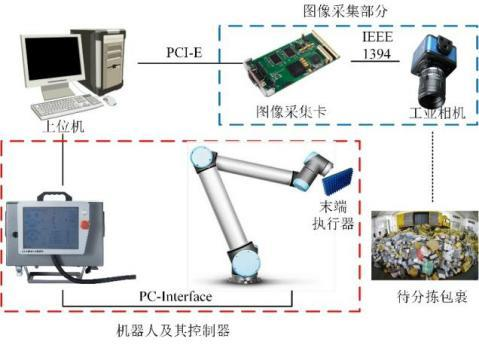
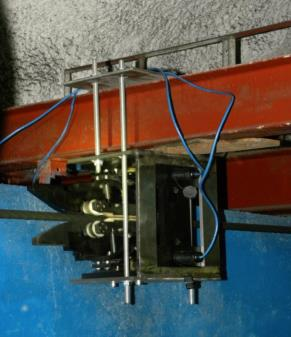
6.4.3移动机械臂视觉拣选系统 6.4.4煤矿钢丝绳无损检测系统
学术论文:学术论文主要发表于IEEE/ASME Transactions on Mechatronics 、ROBOTICA、Journal of Vibration and Control 、Sensors、Applied Intelligence 、Simulation Modelling Practice and Theory、Neural Computing and Applications、《机械工程学报》、《振动工程学报》、《机器人》等国内外重要期刊。
教学科研获奖:
1、面向“互联网+”与“中国制造2025”复合型拔尖创新人才培养综合改革研究与实践,2017年获北京市高等教育教学成果奖二等奖(刘晓平等);
2、搭建创新实践活动平台,培养拔尖创新人才模式的研究与实践,2012年获得北京市高等教育教学成果奖二等奖(刘晓平等);
3、高等教育教学成果评奖管理与信息服务系统的研制与应用,2008年获北京市教育教学成果(高等教育)一等奖(刘晓平(排名第3));
4、面向现代邮政业的人才培养体系创新研究与实践应用,获2020年度邮政行业科学技术奖三等奖(刘晓平等)。
依托基地:邮政行业机器人与无人技术研发中心、北京市邮政智能装备工程技术研究中心。

6.4.5 机器人与无人机技术研发中心 6.4.6 邮政智能装备工程技术中心
6.5 北京邮电大学电接触实验室发展史
6.5.1实验室的成立时间及历任负责人
北京邮电大学电连接与连接器可靠性科研室主要从事电接触科学及电连接器的基础研究。在20世纪80年代美国AMP公司投资了100万美元为章教授扩建了电接触实验室,并且培养了目前仍在实验室工作的周怡琳老师与林雪燕老师。继章继高教授退休之后,许良军老师接手了实验室,在211工程投入的大量资金的资助下,考虑到研究电接触学科是为了连接器产品的应用与发展以及为了立足于国内的连接器行业,我将实验室的名称更改为电连接与连接器可靠性科研室,研究方向也是更加侧重于解决电连接器的设计与使用问题。30多年来北京邮电大学电连接与连接器可靠性科研室已成为国内高校在从事电接触科学的基础研究领域、科研技术手段最先进的科研室之一。
实验室的历任负责人是章继高老师、许良军老师。
章继高:电接触技术专家,中国电接触学科的开拓者之一,在电接触故障分析与机理、尘土与腐蚀生成物的电接触故障特征、微动与滑动影响、接点润滑剂的应用检测方法与机理、电接触故障对通信可靠性影响等方面取得许多研究成果,培养出很多电接触与机电元件方面的专业技术人才,为推动中国电接触学科发展作出了重要贡献。
许良军: 曾担任北京邮电大学自动化学院教授,副院长。1995年-1996年在波兰Wroclaw理工大学电力工程学院做访问学者并于1999年在该校电力工程学院获工学博士学位。获得过北京邮电大学教学观摩二等奖,邮电部高校优秀青年骨干教师,北京市优秀教师。
6.5.2重要科研成果
目前实验室在职的三位老师有着不同的科研成果,以下是他们个人介绍及科研成果。
1. 孔志刚老师
北京邮电大学现代邮政学院担任副教授。主要研究方向包括电连接器设计及仿真;电连接故障现象分析和机理研究;机电元件失效分析及可靠性评估;电连接材料性能及其可靠性研究;有限元建模及仿真。
2. 周怡琳老师
北京邮电大学人工智能学院教授,博士生导师,担任测控技术与仪器专业负责人;兼任中国电子学会元件分会连接器开关技术委员会副主任委员。主要研究方向为电接触理论和电连接可靠性:环境污染对电接触可靠性的影响。
3. 林雪燕老师
北京邮电大学人工智能学院任副教授,硕士生导师。从事电连接与连接器失效机理、可靠性检测技术、信号完整性分析与设计、控制系统设计等领域的研究。
三位老师主持或参与的科研项目:
(1)国家重点研发计划子课题“宽频带同轴步进衰减器研制及产业化开发”(2018YFF01011604).
(2)企、事业单位横向委托项目“电接触防护材料特性分析”。
(3)企、事业单位横向委托项目“金手指连接器通流能力提升” 。
(4)企、事业单位横向委托项目“大接线容量弹簧端子的研发” 。
(5)企、事业单位横向委托项目“轨道交通装备用连接器仿真技术研究” 。
(6)企、事业单位横向委托项目“HERCULES系列高速连接器的研制” 。
(7)企、事业单位横向委托项目“连接器可靠性研究及设计改进” 。
(8)企、事业单位横向委托项目“手机连接器的可靠性(CROMP)” 。
(9)北邮科研创新计划项目“环境对电连接器镀层质量检测与可靠性影响研究” 。
(10)企、事业单位横向委托项目“一种新型低成本焊点材料性能及可靠性研究” 。
(11)企、事业单位横向委托项目“自阻尼导线微动磨损特性研究” 。
(12)企、事业单位横向委托项目“串型直流电弧故障检测技术研究” 。
(13)北邮科研创新计划项目“焊点材料力学性能检测及可靠性分析” 。
(14)企、事业单位横向委托项目“总配线架、通信电缆分线盒检测” 。
(15)企、事业单位横向委托项目“高速背板连接器56G方案设计”。
6.5.3实验室主要研究方向
研究方向主要为电接触故障检测分析方法、故障机理、尘土的电接触故障特征、腐蚀生成物的电接触故障特征、微动与滑动对电接触的影响、接点润滑剂的应用、检测方法与机理及电接触故障对通信可靠性的影响等方面。科研室近期的研究主题为:数字及通信系统中电连接器材料的故障机理研究及可靠性分析。同时对金属材料力学性能、电连接器可靠性、连接器性能的计算机仿真模型建立及计算机模拟,连接器设计,连接器寿命及可靠性的测试方法与衡量标准等相关课题展开研究。
6.5.4学生培养及实验室重要设备
北京邮电大学电连接与连接器可靠性科研室已成为一个有发展潜力的教学科研队伍。目前已发展成老中青结合的梯队,都具有博士学位,具备培养博士后、博士生、硕士生的能力,已经培养了博士近20名,硕士近300名。开出了独具特色的电接触领域研究生系列课程。成为电接触领域国际、国内有影响的教学、科研基地。
通过建设,电接触实验室已发展到200多平米;具有扫描电子显微镜、X射线能谱仪、三维轮廓仪、通信性能测试仪、高频阻抗测试仪、工作站,ANSYS有限元分析等大型设备及软件的部级重点实验室。科研室现已具备电接触表面微观探测分析,电接触故障诊断、故障预测,电接触失效机理分析,连接器性能的计算机仿真模拟,通信系统电接触可靠性分析等能力。
6.5.5实验室科研经费以及科研论文发表情况
北京邮电大学电连接与连接器可靠性科研室已成功的与国外高校和国际大公司进行了广泛的科研合作,包括国家重点研发项目、国家自然科学基金、横向企业项目,其中包括波兰Wroclaw技术大学,美国AMP公司、Molex公司、FCI公司、国家电网、华为公司、中国中车、中航光电等。其中科研经费800余万元,发表SCI、EI检索及其他论文200余篇。此外,有两部专著如下图。
图6.5.1
科研室与国际、国内同行进行了广泛的学术交流,确立科研室在国际电接触领域的学术地位,推动我国电接触学研究的进展及机电元件的设计制造水平,缩短我国在该领域与国际先进水平的差距。
6.6 医疗机器人实验室
北京邮电大学医疗机器人实验室成立于2016年,创建人/负责人苏柏泉教授,主要研究方向为医疗机器人和医工结合课题。发表包括IEEE TBME,IEEE RA-L,SCIENCE CHINA Information Sciences等期刊和IEEE ICRA等会议论文共20余篇。科学出版社出版专著一部。授权发明专利14项。获得会议论文奖含Best Paper Finalist (First author, WRC SARA 2021)和Best Application Award (Co-author, 3M-NANO 2016), Nomination of Outstanding Youth Paper Award (Supervisor, PIBM 2017),担任会议Session Chair/Co-chair (WRC SARA 2019, WRC SARA 2021, 3M-NANO 2016, ICCA 2018)。2022世界机器人大会先进机器人与自动化学术会议(WRC SARA 2022,北京)特邀论坛主席(共同)。指导本科生获得北京市优秀学士学位论文2人次,校级优秀学士学位论文4人次。指导研究生或本科生获国家级竞赛一等奖(三项)及多项省部级学科竞赛奖。所指导研究生获国家奖学金、优秀毕业生、优秀研究生等奖励或称号。培养北京市优秀学士学位论文获得者2人,北京邮电大学校级优秀学士学位论文4人。承担国家自然科学基金面上项目(61573208),2017年获批主持国家自然科学基金重大研究计划培育项目(91748103),2022年获批国家自然科学基金(62273055)项目。同时承担北京市自然科学基金重点研究专题项目子课题。科研成果转化60万元。
图6.6.1第七届全国大学生生物医学工程创新设计竞赛 一等奖

图6.6.2第二十四届中国机器人及人工智能大赛全国总决赛 一等奖
图6.6.3 2023北京邮电大学优秀硕士学位论文
图6.6.4 2020北京市普通高校优秀本科毕业设计(论文)(同年2人次:吴昊城、滕运来)
图6.6.5专著:2021年科学出版社-《激光治疗的机器人系统方法》
图6.6.6 IEEE TBME论文
6.7 智能装备实验室
智能装备实验室创建于2007年,致力于从零开始的以特种工业机器人为代表的智能装备原创研发,为我国一些航空制造装备的原始创新以及一些重大型号航空器的生产做出了贡献,同时,智能装备实验室在民用自动化装备、自动化生产线、手持式自动化工具以及基于表面肌电的多模融合导航机器人系统等方面的原创设计也做了大量工作。实验室先后获得中航工业科技成果奖二等奖1项、教育部科技成果奖1项,发表SCI/EI学术论文30余篇,专著1部。
研究方向:
1. 智能装备的设计方法;
2. 机械结构的力学分析和有限元分析;
3. 复杂机械系统的原创解决方案;
4. 基于表面肌电的多模融合导航机器人系统。
6.7.1实验室负责人简介
李金泉,博士,副教授,博士生导师,北京邮电大学智能装备实验室负责人。作为项目负责人或主研人先后完成40多项大中型项目,其中重大航空生产装备项目十余项,为航空制造装备的发展做出了贡献,曾经成功解决了某重大型号航空飞行器装配过程中的关键工艺难题。在企业工作期间实现了“在自己设计的生产线上生产自己设计的产品”;三十年间研发的生产装备可以生产“地上跑的农用车和天上飞的航空器”;在高校工作期间先后获得北京市优秀青年工程师、北京邮电大学优秀研究生育人导师、师德标兵、爱心使者等称号;获得中航工业科技成果奖二等奖1项、教育部科技成果奖1项,山东省机械工业系统科技成果奖三等奖1项,发表SCI/EI学术论文30余篇,获得授权发明专利60余项。
6.7.2学生培养与学术成果
自成立来,实验室培养了三十多名优秀人才,其中硕士研究生2人获得北京市优秀毕业生、3人获得北邮校级优秀毕业生。
实验室获得中航工业科技成果奖二等奖1项、教育部科技成果奖1项,发表学术论文60余篇,其中SCI/EI学术论文30余篇,专著1部。
6.7.3部分代表性装备设计成果
智能装备实验室致力于从零开始的原创设计,完成的智能装备设计基本都是基本根据使用方的要求进行的原创设计。
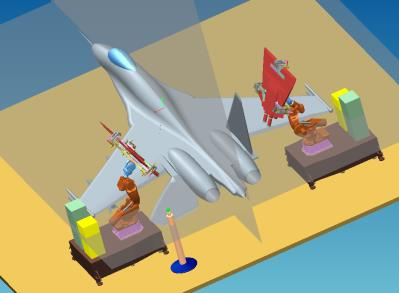

图6.7.1 《尾翼和机身对接安装机器人》
功能:实现尾翼和机身的倾斜轴和轴承的轴孔配合安装。
合作单位:清华大学机械系机器人实验室、北京邮电大学智能装备实验室

图6.7.2 《XXX数字化装配制孔工装》
功能:xxx机身的数字化装配和多面制孔。
合作单位:清华大学机械系机器人实验室、北京邮电大学智能装备实验室


图6.7.3 《弯管自动抛光生产线》
功能:基于机器视觉的操作导向和机器人双臂协调工作实现弯管的自动化抛光和拉丝。
合作单位:北京锐度方智能科技有限公司、北京邮电大学智能装备实验室。
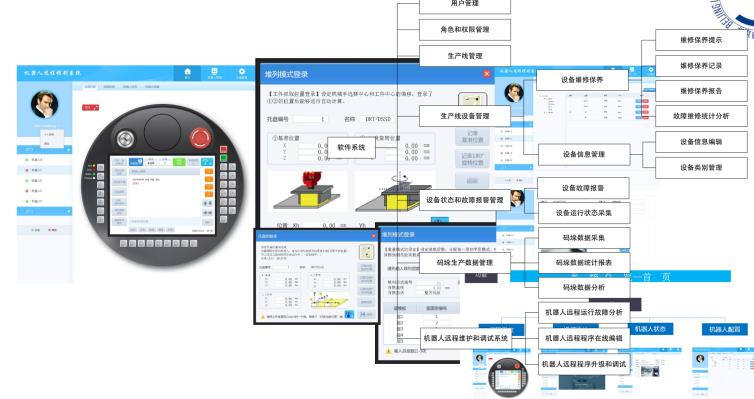
图6.7.4 《 青岛宝佳码垛机器人远程监控和调试系统》
功能:实现对码垛机器人的远程监控和调试。
合作单位:北京锐度方智能科技有限公司、北京邮电大学智能装备实验室。
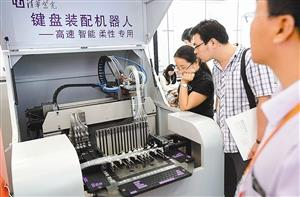

图6.7.5 《键盘装配机器人》
笔记本键盘的键帽装配。
合作单位:清华紫光机器人有限公司、北京邮电大学智能装备实验室。

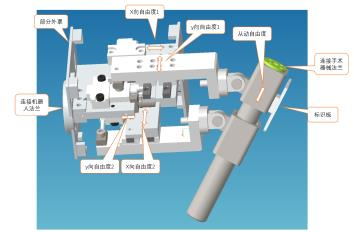

图6.7.6《手持式幼果套袋器》 图6.7.7《骨科手术机器人末端执行器》
给苹果、梨等水果的幼果套袋 安装骨科手术器械并做多自由度运动
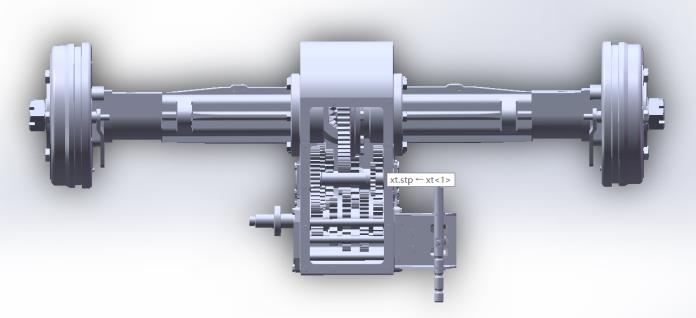
图6.7.8 《农用车联体车桥》
|
七.机械工程专业近年来的科研发展状况
说明:该资料为方维老师查阅有记录以来的科研相关的资料撰写和分析而成。因为系统记录和历史问题,可能存在统计不全的问题,敬请谅解。
7.1 科研项目情况统计
据不完全统计,机械工程专业近20年来(2001年-2021年)的科研立项数和到账经费情况如表格所示,其中总立项数为414项,总到账金额为12370万元。
表格 7.1 2001-2021年机械工程专业科研项目情况统计表
年份 |
项目数量 |
金额(万元) |
项目总数 |
经费总额 (万元) |
纵向 |
横向 |
纵向 |
横向 |
2001 |
3 |
3 |
30 |
97 |
6 |
127 |
2002 |
8 |
6 |
80 |
90 |
14 |
170 |
2003 |
2 |
5 |
22 |
75 |
7 |
97 |
2004 |
5 |
11 |
620 |
117 |
16 |
737 |
2005 |
4 |
6 |
63 |
105 |
10 |
168 |
2006 |
7 |
8 |
283 |
41 |
15 |
324 |
2007 |
9 |
7 |
322 |
145 |
16 |
467 |
2008 |
8 |
6 |
139 |
91 |
14 |
229 |
2009 |
11 |
10 |
230 |
70 |
21 |
299 |
2010 |
11 |
4 |
375 |
85 |
15 |
460 |
2011 |
11 |
9 |
284 |
199 |
20 |
483 |
2012 |
5 |
11 |
301 |
320 |
16 |
621 |
2013 |
13 |
16 |
941 |
463 |
29 |
1404 |
2014 |
4 |
20 |
174 |
426 |
24 |
600 |
2015 |
4 |
8 |
143 |
284 |
12 |
427 |
2016 |
5 |
16 |
93 |
396 |
21 |
488 |
2017 |
13 |
17 |
351 |
281 |
30 |
632 |
2018 |
5 |
17 |
237 |
618 |
22 |
854 |
2019 |
13 |
20 |
601 |
591 |
33 |
1192 |
2020 |
12 |
20 |
474 |
576 |
32 |
1050 |
2021 |
12 |
29 |
648 |
893 |
41 |
1542 |
总额 |
165 |
249 |
6411 |
5960 |
414 |
12370 |
从图7.1所示,近20年来科研项目总立项数目呈稳步上升趋势,在2021年度达到最高的41项。与之对应,科研项目到账金额也在稳步上升中,在2013年达到阶段峰值的1404万后,近五年来又重拾明显上升趋势,从2016年度到账488万稳步上升至2021年度到账的1542万。
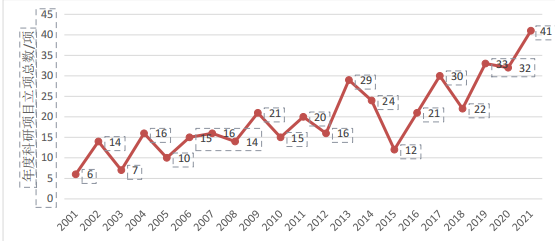
图 7.27 2001-2021年机械工程专业年度科研立项数量
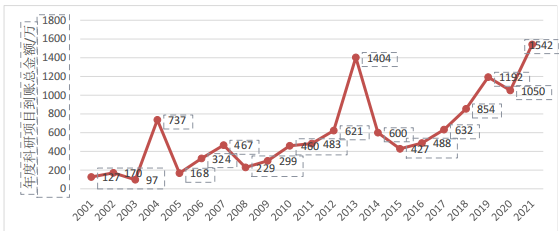
图 7.28 2001-2021年机械工程专业年度科研到账金额
7.1.1 纵向科研情况统计趋势图
从机械工程专业的纵向立项数和到账金额来看(如图 和图 所示),纵向项目数量和经费总体趋势均在上升。近5年来年平均立项数超过了10项,且在2013年、2017年和2019年纵向项目数量达到峰值13项。到账经费在2013年出现峰值941万元,后续有一定回落,但近5年来也在稳步上升,其中2021年到账经费648万。
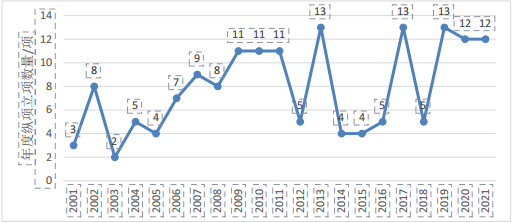
图 7.29 2001-2021年机械工程专业年度纵向课题立项数量
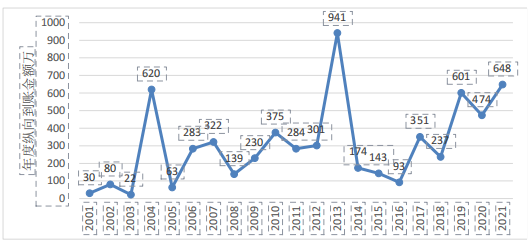
图7. 30 2001-2021年机械工程专业年度纵向课题到账金额
7.1.2 横向科研情况统计趋势图
从机械工程专业的横向立项数和到账金额来看(如图 和图 所示),近20年来横向项目数量和到账经费呈明显上升趋势,2001-2021年累积横向立项249项,立项金额共5960万元。近5年来年平均横向立项数超过了20项,期中2021年立项数量达到29项,年度到账金额达到893万。
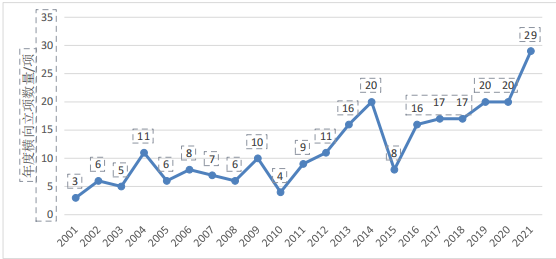
图 7.31 2001-2021年机械工程专业年度横向课题立项数量
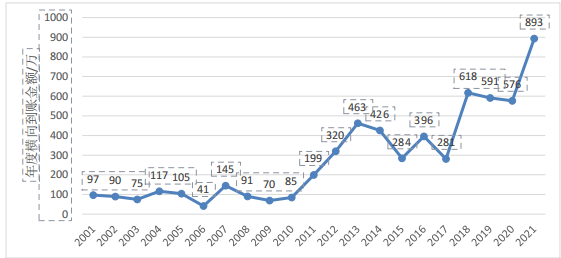
图7. 32 2001-2021年机械工程专业年度横向课题到账金额
7.2 科研论文发表情况
机械工程专业科研论文发表情况如表 所示,2013年至2021年间,共发表科研论文共计443篇,平均每年约49篇。其中近三年来,发表数量从2019年的39篇快速上升至2021年的65篇。
表格 7.2 2013-2021年机械工程专业科研论文发表统计表
年份 |
期刊 |
会议 |
总数 |
2013 |
39 |
17 |
56 |
2014 |
32 |
18 |
50 |
2015 |
24 |
23 |
47 |
2016 |
17 |
23 |
40 |
2017 |
15 |
24 |
39 |
2018 |
32 |
19 |
51 |
2019 |
23 |
16 |
39 |
2020 |
39 |
17 |
56 |
2021 |
42 |
23 |
65 |
合计 |
263 |
180 |
443 |
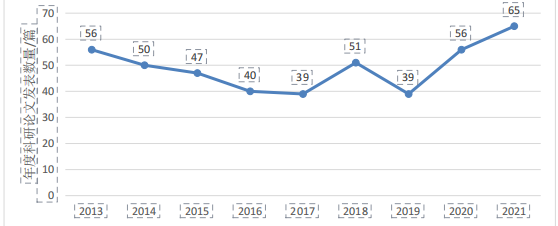
图7. 33 2013-2021年机械工程专业科研论文发表统计表
八. 学生竞赛成果
北京邮电大学机械工程专业在大学生创新和竞赛方面做了大量的工作,在自动化学院期间,大创基地负责人为郭磊老师,隶属现代邮政学院之后,大创基地负责人为李海源老师,基地负责人及专业的相关老师在大学生创新创业及学科竞赛方面付出了很多心血,取得了优异的成绩,从2003年有记录到2021年年底,共获得省部级以上的奖励183项,详细见李海源老师整理的EXCEL文档。
九.附件
9.1 《登上“珠穆朗玛峰”的人》---记廖启征教授

廖启征教授
廖启征,男,汉族,1947年2月出生于解放前的北平,中共党员,工学博士,二级教授,博士生导师。
1982年7月,本科毕业于北京邮电学院机械系邮政机械专业。1985年6月,硕士毕业于北京邮电学院机械系机械制造专业并留校任教。1987年12月,博士毕业于北京航空航天大学机械系机械学专业。1987年11月,被破格晋升为副教授。1989年4月,他加入中国共产党。1991年6月,被破格晋升为教授,同年并获得享受政府特殊津贴荣誉。1992年获得国家级有突出贡献的中青年科技专家荣誉,做出突出贡献的中国博士学位获得者。1992年2月到1993年2月廖启征赴英国伦敦国王学院做高级访问学者。1997 年4月到10月廖启征担任高级访问学者,前往美国加州大学尔湾分校进行交流学习并参加ASME(美国机械工程师协会)国际会议。2012年3月,廖启征教授从北京邮电大学退休。2019年,被授予“庆祝中华人民共和国成立70周年”纪念章,见图9.1。

图9.1 授予“庆祝中华人民共和国成立70周年”纪念章大会
廖启征教授在机器人机构学领域辛勤耕耘30载(1982~2012)。30年来,他上下求索,一再攀登高峰,取得了累累硕果。他和实验室同事们的成果先后获得国家教委科技进步一等奖(排名第一)、国家自然科学四等奖(排名第一)和国家教委科技进步三等奖(排名第二)。30年来,廖启征教授出版专著一部《空间连杆机构与机器人机构分析》,译著一部《机构与机械手分析》,在国内外机器人机构学知名期刊和重要会议上发表SCI/EI检索论文近200余篇,授权国家发明专利10余项。他的文章屡屡被国内外学者所引用。廖启征教授曾担任北京邮电大学学术委员会委员、中国机械工程学会国际机器与机构学理论委员会委员和国际机器人机构学期刊Journal of Mechanism and Robotics的副主编(2008~2011)。
30年来,廖启征教授培养博士研究生和硕士研究生有百余名,很多优秀的博士生和硕士生毕业后继续从事着机器人机构学的相关研究领域,如:苏海军教授(美国俄亥俄州立大学教授,1998届硕士生)、黄昔光教授(原北方工业大学教授,现北京邮电大学教授,2008届博士生)、郭磊副教授(北京邮电大学副教授,2007届博士生)、张英副教授(北京邮电大学副教授,2015届博士生)、甘东明助理教授(美国普渡大学助理教授,2009届博士生)、宋原(北京邮电大学工程师,2014届博士生)和周利锋(美国纽约布法罗分校博士后,2012届硕士生)等。
接下来就让我们走进廖启征教授,探寻他是如何选定机器人机构学方向以及如何做出世界级的科研成果。
一、敏而好学 志存高远
1947年2月,廖启征出生在解放前的北平。北京浓重的文化氛围深深地影响了少年时代的廖启征,使他养成了勤奋好学和乐于助人的性格。在北京三中几年的学习当中,他的学习成绩一直名列前茅。“我之所以学习成绩好是因为我乐于帮助别人”,廖启征这样认为,“每当老师讲解一个新概念时,同学们当中总会产生许多问题,一些模糊的认识或错误的理解总会反映到作业当中,由于我乐于助人,所以同学们总会到我这里寻找答案,我用不着总结就把握了学习当中的重点和难点。为了给同学们解答问题,我不但要自己学会搞懂课堂知识,而且要对别人的解题方法进行分析、判断、对比,指出其正确或错误,这些都要自己独立地思考,独立地解决问题。知识的取得和能力的培养就是在不知不觉帮助别人的过程中完成的。现在回想起来,这种独立解决问题的能力,对后来的科研工作是至关重要的。”初三的时候,曾经有一个同学声称解决了圆规直尺三等分任意角的问题。当他把他的解法讲给廖启征时,廖启征发现他早已设想过这种方法,只不过后来发现了错误,没有声张罢了。就这样廖启征在中学阶段打下了良好的知识基础,为后来的成绩的取得提供了保证。他除了学好课内的知识外,在课余时间他还钻研无线电、半导体进行电子小制作,修收音机、做收音机、扩音机,梦想着像爱迪生一样做一个发明家。
十年动乱使廖启征和其他千千万万的青少年失去了继续求学的机会,1968 年他被安排到内蒙古临河县农村插队。发明家的梦想虽然受到了沉重的打击,但是爱迪生的故事却鼓舞着他去追求他的梦。别的同龄人在离开北京前,用手里的钱买了吃的穿的用的以备不时之需,而他却倾其所有买了大批半导体元器件处理品。知青的生活是艰苦的,但强烈的信念支持着他,在劳动之余,他忘情地钻研着无线电。一个偶然的机会,他得知为了提高民兵的战斗力,有人试验了抛射炸药包,他惊喜地发现,所学知识终于有用武之地了。他当即和武装部长商量,制作一台无线电遥控地雷装置。经过几个星期的努力,当100米外的地雷随着起爆的命令炸响时,老乡们惊呆了,他成功了!这一声巨响传到县里,县人武部把他借调到县里。在县里,他继续努力设计,将控制通道数扩展到3组、5组。由于他的突出成绩,受到记三等功一次的奖励。成功的喜悦使他踌躇满志。
1972 年,他被招工到天津大港油田物探公司仪修站当了一名工人。仪修站的工作主要是负责各种仪器设备的维修改造和试制,这里的条件与临河相比,真是天壤之别。他喜不自禁,凭着他的无线电知识,很快就熟悉了这里的工作。经过他艰苦的努力,勤奋的工作,测桥仪研制出来了,无线电遥控放炮的收发系统诞生了。为了搞陆地电火花震源控制系统,物探公司成立了攻关队,他自告奋勇进了攻关队,承担了整个控制系统的设计和施工。电火花震源是和高压大电流的强电打交道,稍有不慎就有生命危险。野外施工条件十分恶劣,他和同事们一起以科学的态度对待整个设计施工,使得整个系统工作安全可靠。在仪修站的几年里,由于他突出的工作成绩,几乎年年被评为先进生产者或技术标兵。文质彬彬的他,略显内向,为人随和,别人总愿找他帮忙,收音机坏了,电视机不出图像了,他总乐意帮助而且手到病除。于是同事们都亲切地称他为“博士”,而那时的他却连大学的门还没进呢。
发明家的梦虽然没有圆,但曲折的人生经历却磨炼了他不屈不挠的坚强意志,丰富了知识,开阔了思路,为他日后的成功打下了坚实的基础。值得一提的是,在仪修站廖启征遇到了自己的终身伴侣刘女士。正是志同道合的刘女士,在无数个日日夜夜里,给了廖启征巨大的支持和细心的关怀,使得廖启征能全身心地投人到事业中去,不断取得好成绩。
二、名师指路 勇攀高峰
中华民族经历了痛苦的 10年后,科学的春天来到了。在恢复高考的第2年,1978年,己过而立之年的廖启征考入了北京邮电学院机械系,终于跨进了那向往已久的大学校园,整整10年后他又回到了北京。
这是多么难得的机会,时不我待,他十分珍惜每寸光阴争分夺秒要把过去损失的时光夺回来。他如饥似渴地吸取知识的养分,大学4 年,他多次被评为三好学生,并以优异的成绩完成了本科学业。1982年本科毕业前,他从边弘文老师处听说有一个从英国回来的梁崇高老师,多年从事基础理论教学,带回了国外的机械学研究题目,故而对梁老师的研究方向产生了兴趣。廖启征当时报考梁老师的研究生时,想法很单纯,由于他从小到大除了学习和插队,就是搞实际设备的设计和开发。上大学也属于带薪学习,按照当时的规定,本科毕业后是要回原单位工作,即回大港油田工作。因为他从大港油田出来的,对油田的情况非常了解,深知油田是生产单位,生产任务压的很紧,不会有从事理论研究的可能,甚至连理论学习的机会都不会有,所以他想趁硕士学习的机会做一下理论研究,看看理论研究到底怎么做。另外他从小学到大学一直喜欢数理化课程,而且成绩也不错,故而有一定的基础。他顺利地通过硕士考试,考取了梁老师的硕士研究生,正是梁老师把他引进了机器人机构学这个充满挑战的研究领域。
梁崇高教授是一位思想敏锐、富有洞察力的学者,他在英国学习期间曾广泛地了解了国外机构学的研究方向,参与了访问单位的科研,并编写了计算机专家系统,且了解到空间机构发展中还存在着许多问题,亟待解决。他给廖启征提供了几个论文的选题,其中最难的就是空间机构位移分析问题。梁崇高教授曾多次明确指出,这些种类机构搞出任何一个都是国际水平,其中最难的7R机构被美国哥伦比亚大学机构学权威F. Freudenstein教授称为机构运动分析中的“珠穆朗玛峰”,这对廖启征有很大的鼓励和诱惑。尽管选这个题目需冒很大的风险,但是他还是选择了这个具有挑战性的理论性题目。
从外表看,廖启征显得很文静,是个典型的文弱书生。但他却喜欢挑战,敢于冒险,内心充满拼搏的激情,从不畏惧困难。他暗下决心一定要设法努力攀上这座科技领域的“珠穆朗玛峰”。他废寝忘食地阅读国外的相关研究文献,揣犘着梁崇高教授在空间机构学课程上讲解的多种空间机构运动学的求解方法。他不停地思考着、比较着、计算着。最后功夫不负有心人,他发现了国外学者的各种方法都不同程度存在着不足之处。经过长时间的反复思考探索,他逐步建立了自己独特的建模和代数求解方法——酉交矩阵法的建模方法和线性消元与结式消元相结合的消元求解方法。新方法的建立为解决串联空间机构运动学难题开拓了新的途径。
1984年,廖启征解决了6R-P机构,并写成论文在全国机构学会议上发表。廖启征由于当时是带薪上学,按照规定,本科毕业后需回天津大港油田,硕士毕业后回天津进行再分配。他想着将来的工作就是完成单位的生产任务,可能没有机会再次从事理论研究工作,所以他把全部精力放到硕士论文的撰写上,在完成6R-P机构求解的基础上,又完成了零件的机械加工,并制作了模型,进而对结果进行了验证。1985年,他完成了硕士学位论文,参加答辦的全体委员一致认为他的论文达到很高的水平,建议推荐他继续深造。他的论文受到了北京航空航天大学机构学博士生导师、中国科学院院士张启先教授的重视和好评。故而北京邮电学院机械系决定让其留校,同时推荐报考张启先教授的博士研究生,由北京邮电学院出资,委托代培。
1986年3月,他进入北航攻读博士学位,并开始对空间单环机构中最困难最复杂的机构——7R机构进行研究,他向机构学中的“珠穆朗玛峰”发起了最后的冲击。北京航空航天学院的学习研究条件是很好的,导师张启先教授多年从事空间机构学研究,积累了丰富的经验和资料,在他的指导和帮助下,廖启征以新酉交矩阵法为工具,终于从理论上解决7R问题。为了通过计算机检验而确保理论的正确,廖启征全力投人紧张的编程计算。即将成功的喜悦鼓舞着他,有时他干脆把铺盖搬到实验室,一算就是一夜。努力,努力,再努力,终于廖启征圆满解决了空间7R机构位移分析的难题,勇敢地登上了“珠穆朗玛峰”。
廖启征教授于1986年9月在 《机械工程学报》发表了题为《空间7R机构位移分析的新研究》,并于同一年在第四届全国机构学学术讨论会上发表了题为《具有16个实根的空间7R机构》,这两篇文章的发表标志着廖启征教授成为世界上第一个攻克机构学“珠穆朗玛峰”难题的学者,也使我国在空间机构位移方面进入世界先进行列(见图2)。廖启征教授于1993年在国际一流学术刊物 MMT (Mechanism and Machine Theory)上发表了一篇重要文章 《Synthesizing Spatial 7R Mechanisms with 16 Assembly Configurations》(《具有16种装配构型的空间7R 机构综合》),首次将自己在求解空间7R机构位移分析问题的成果展示给国际同行(注:尽管该文章发表的时候,国际上已有文章于1989年综合出具有16种装配构型的6R机械手,但是廖老师综合出的时间实际上是1986年)。尽管直到现在,国际学者多数认为首次解决该问题的文章为1986年在MMT上发表的题为“Displacement Analysis of the General Spatial 7-Link 7R Mechanism”一文,但是从稿件投递时间来看,首次解决该问题的学者应为廖启征教授。

图9.2 廖启征和具有16组实数解的7R机构
廖启征成功了!“在科学上没有平坦的大道,只有不畏艰险,勇于攀登的人,才有希望到达光辉的顶点”,此时不禁使我们又想起这句话。1987年廖启征通过博士论文答辦,并成为北京航空航天大学优秀博士论文获得者,至此他仅花了一年半的时间。
三、上下求索 再攀高峰
廖启征所在的实验室至此已在机器人机构运动学建模和代数求解方面形成了自己的特色,廖启征和实验室的同事们在巩固和深入原来研究领域的基础上,积极拓宽研究领域,对可重构模块化机器人、平面连杆机构、机器人并联柔顺系统、空间并联机构、虚轴机床和网络配线机器人等展开了相关研究,取得了一系列成果。其中科研项目"空间机构位移分析"获得了1987年国家教委科技进步一等奖和1989年国家自然科学四等奖;科研项目"并联机器人机构位置正解"解决了4-6并联机构位置的正解问题,获得了1996年国家教委科技进步三等奖。廖启征及其所在实验室先后承担了国家自然科学基金、国家攀登计划、国家973项目、国家863项目等重点课题。值得一提的是国家攀登计划和国家973项目是由吴文俊院士领导的。由于梁崇高教授和廖启征教授等人在机器人机构运动学分析代数求解法的研究特色,受到吴文俊院士的注意,因此邀请北京邮电大学的研究组参加。梁崇高教授和廖启征教授先后代表北京邮电大学参加了吴文俊院士领导的题为:“机器证明及其应用”、“数学机械化及其应用”的攀登计划和题为“数学机械化与自动推理平台”的973项目。
20世纪90年代,由于虚轴机床所具有的独特的优越性能,虚轴机床的研究成为了国际上一个科技热点。廖启征教授和实验室同事们注意到了这个热点,及时把与虚轴机床密切相关的并联机构的运动学研究当成一个新的重要研究方向。经过几年不懈努力,廖启征教授和实验室同事们做出的成绩"并联机器人机构位置正解"再次获得国家教委科技进步三等奖。
廖启征教授在机器人机构学理论研究方面取得了卓著的成绩后,他开始着手思考制约民族机器人产业发展的相关核心零部件,如机器人减速器。于是,他带领实验室团队先后提出平动式啮合电机和各种新型齿轮以及采用其的减速器等,希望改善减速器效率,相关成果发表了一系列专利,其中专利“一种少齿差共面双内啮合齿轮及采用其的减速器”于2017年与珠海怡合科技股份有限公司进行了专利实施许可,实施许可价格为10万元。廖启征和实验室同事们一起在863项目的资助下,研发的网络通讯配线机器人(网络光线自动跳接),解决了目前网络通讯配线中唯一没有解决的自动化问题,通过了科技部组织的专家组验收,目前正在与相关公司开展市场应用和推广,项目研发期间发表的专利“一种自动网络配线装置和配线方法”以及“一种基于CLOS交叉矩阵算法的机械式光纤配线系统”也与北京瑞祺皓迪技术股份有限公司进行了专利实施许可,实施许可价格为30万。此外,他和他的实验室团队积极把自己的研究成果推向实际应用,先后同德国专业机器人公司魏利斯米勒公司、中科院系统所、原机械工业部北京自动化所、华为公司、航天科技集团公司等开展不同层次的合作研究。其为广州某公司设计了用于装卸作业的配重式过桥装置,该项成果目前已创造产值数百万,获得国家专利一项,荣获中国物流与采购联合会科学技术进步三等奖。廖启征教授希望自己的研究成果能多为国家的经济建设贡献一份力量。
廖启征教授在机器人机构学方向上谱写出了灿烂的人生之歌,希望他的实验室团队能继续传承发扬他的专研精神,为我国的机器人机构学方向贡献一份力量。
四、淡泊名利 乐于奉献
作为一名优秀的中共党员,廖启征教授在日常的工作和生活中处处以身作则,顾全大局,为人正直,谦虚和蔼,乐于助人,淡漠名利,充分体现了一名优秀共产党员的高尚情操。2003年,廖启征教授获得北京邮电大学“优秀共产党员”称号。
作为一名人民教师,廖启征教授以满腔的热情投入到祖国的教育事业当中。30年来一直坚持在教学第一线工作,热爱学生,关心学生。对于学生提出的任何问题,廖老师都会耐心地讲解,引导,帮助学生充分吸收所学的知识,开拓思路;同时将自己在科研中的新发现,新思想引入到教学中,通过共同探讨培养学生的思维能力,实践能力和创新能力。走进机器人实验室,你总可以看到廖老师辛勤工作的身影,要么在全神贯注地思考问题,要么在与学生进行深入的讨论,每次探讨完,学生们都受益匪浅,或者受到启发,得到灵感,或者在讨论中解决了疑难问题。因此,在学生中流传着这样一句话:“有困难,找廖老师”,足见大家对廖老师的敬佩和信任。在非典期间,廖老师仍然坚持每天到实验室,关切地询问同学们的身体情况,一边做学生的思想政治工作,一边对参加央视举办的第二届全国大学生机器人电视大赛的学生进行技术指导,使参赛机器人的研制进度按原计划顺利进行,没有受到任何的影响。不求鲜花和掌声,只求桃李满天下,只求学子能够站在科技的前沿,这就是廖启征教授作为教师最大的心愿。2004年,廖老师被评为北京市优秀教师。
作为北京邮电大学机器人实验室的前负责人,廖启征教授非常重视学术传承。现在实验室的负责人是魏世民教授,魏老师的博士课题就是在其清华大学的指导老师和廖老师的共同指导下完成的,魏老师在读博期间,受实验室氛围影响和廖老师对机器人机构学方向热爱的感染,也深深地被机器人机构学方向的研究所吸引,被实验室友好的氛围所打动,于是在2002年博士毕业后申请留在了北京邮电大学任教,现为现代邮政学院副院长。除了魏老师,黄昔光教授、郭磊副教授、张英副教授和宋原工程师等也申请留在了北京邮电大学任教,积极在机器人领域贡献自己的一份力量。
作为机电中心的一员,廖启征教授积极帮助同事。他在加州大学尔湾分校访学期间,与该校J. McCarthy 教授建立了良好的关系。J. McCarthy 教授为机器人机构学国际知名学者,受廖老师邀请,他于1999年9月来北邮进行了为期一个周的短期讲学,此后McCarthy 教授曾多次来北京邮电大学进行学术讲座,深受北邮机械学子的喜欢。在廖老师的引荐下,本中心的李端玲教授分别于2008-2009和2017年赴美国加州大学尔湾分校做高级访问学者。
廖启征教授在职30年期间,从不计较名利与得失,却会在大家需要帮助的时候积极伸出援手,希望我们以廖老师为师德榜样,为北邮的明天贡献力量,为祖国的明天贡献力量。
2022年07月15日
(作者:张英)
9.2 许良军教授采访
采访目的:回顾北邮机械工程专业的发展情况以及电接触实验室的发展历史
采访对象:许良军老师
采访人:孔志刚老师
开头:许老师您好,非常感谢您能从百忙之中抽出时间来接受我们的采访,因为我们知道许老师您是在北邮的机械专业获得了学士和硕士学位,并且后来一直在学校的机械工程系工作,所以对北邮的机械一定是非常的熟悉,我们想就老师您当时工作期间学校机械专业咨询一些问题。
采访问题:
问题1:在老师您工作时期,学校的机械专业的发展状况是怎么样的呢,比如说学生的数量和状况以及师资的数量和学历分布?
回答:我们学校的机械专业历史是比较悠久的,并且发展状况是一直随着社会需求的变化而变化的。在我刚参加工作的时候,邮电部还未被撤销,机械系分为邮政机械和电信机械两个方向,之后邮电部撤销,机械工程专业面向机电一体化以及自动化的需要被并入自动化学院并发展出了控制科学与工程专业的分支,随着专业的不断发展,2008年被评为北京市重点学科。在许多老师的共同努力下,机械工程专业已经成为了国家级特色专业,首批入选了教育部“卓越工程师教育培养计划”。学生的数量一直是在90-150人之间,老师的数量在50人左右并且大多是博士学历,规模一直较为稳定。
问题2:在老师您如此长的工作时间中,机械工程专业的发展一定取得了较大的收获,请问历任机械工程专业负责人都是哪几位老师,那么在历任机械工程专业负责人的带领下,机械工程专业有哪些科研方向,分别取得了哪些重大科研成果以及培养了哪些著名校友呢?
回答:机械工程专业的带头人有章继高老师、孙汉旭老师和魏世民老师等等,章继高老师在研究电接触故障特别是尘土和腐蚀生成物的造诣颇丰,于2007年荣获IEEE霍姆科学成就奖。在廖启征老师的带领下,于机构学方面做出了重大突破,获得了国家科技进步奖二等奖。魏世民与贾庆轩老师的团队在空间机器人方面也是研究出了有较大影响力的成果,完成国家自然科学基金课题和国家重大基础研究“973”课题多项。

图9.3 章继高教授2007年荣获IEEE霍姆科学成就奖。
问题3:许老师您是专门研究机械工程专业下的电接触与电连接方向的,而电接触实验室的历史也较为悠久,那么您可以聊聊关于实验室的发展历史以及研究方向吗?
回答:80年代章继高教授从美国访学回来之后创立了电接触实验室,当时的研究方向侧重于研究环境对电接触触点的可靠性影响。在1997年末,安普公司投资了100万美元为章教授扩建了电接触实验室,并且培养了目前仍在实验室工作的周怡琳老师与林雪燕老师。继章教授退休之后,我接手了这个实验室,考虑到研究电接触学科是为了连接器产品的应用与发展以及为了立足于国内的连接器行业,我将实验室的名称更改为电连接与连接器可靠性科研室,研究方向也是更加侧重于解决电连接器的设计与使用问题,随着4G与5G时代的到来,实验室的林雪燕老师也是将研究重心放到了高频高速连接器上,经过这么多年的发展,我们实验室在连接器行业已经是站稳了脚跟。
问题4:好的老师,现在我们对实验室的基本情况有了一定的了解,众所周知实验室开展研究是需要一定的经济支持的,那么实验室是从何获取的科研经费呢,并且凭借着充足的科研经费实验室取得了怎样的科研成果呢?
回答:由于国外的连接器行业发展较早,我们实验室初期的发展主要是依靠外企的资助,80年代安普公司给了章继高老师100万美元对电接触实验室进行扩建,在我当时回国的时候,国家给了我们归国人员一批基金,我也是凭借着基金为实验室购置了一批实验设备。之后实验室与芬兰诺基亚公司合作了十余年,诺基亚公司给我们提供了较多的资助。随着国内连接器行业的快速发展,实验室与国内的企业联系也更加密切,华为公司与实验室也有了较多次的合作。在多年的努力下,实验室发表了大量的SCI/EI论文和专利以及拥有了两部专著。
结束语:再次感谢许老师今天能够接受我们的采访,今天的采访就到这里结束了,祝老师身体健康,老师再见。
9.3时良平教授专访
1. 基本信息
被采访人:时良平老师。
时良平教授于1961年毕业于西安交通大学,北京邮电大学教授,博士生导师,中国通信学会邮政委员会委员,国家邮政局科技委委员。时良平教授长期从事计算机控制及自动化,邮政技术等方面的教学与科研工作。主编《邮政技术设备与管理》,撰写《现代邮政技术概论》、《邮政自动化》等教材、著作3部,编制、出版“分拣设备数据交换规范”、“邮政生产设备分类与代码”等通信行业及邮政行业标准12个。时良平教授除完成正常教学与科研工作外,完成了“动态称量基本技术研究”、“蓄电池牵引车”等8项部级科研项目及“速递电子信函”等5项横向项目。
采访人:韩磊。北京邮电大学现代邮政(自动化)学院教师。
2. 采访记录
韩:时老师您好,感谢您在百忙之中抽出时间参加我们这次专访。能不能请您首先谈谈您在工作期间,北邮机械专业的发展状况。比如时任的院系领导是哪几位?学生状况、师资、科研情况等?
时:我是1963年到北邮的,当年有六个老师(组长:刘永为,成员:赵治安,刘蕴哲(女),聂宜端(女),刘恩池(实验员),时良平),当时邮政机械专业归工程经济系管理的。在“文革”前,大概66-67年把邮政机械专业从工程经济系划到北京邮电学院的金属部了。当时从天津大学、邮电学院的机械教研室、制图教研室来的老师,一共大概有20几个老师。后来(文科期间)更名为3系, 1系是有线,2系是无线,3系就是邮政机械专业。当时系里有两个专业,一个是邮政机械,一个是电信机械,后面电信机械专业没了。因为邮政机械是机电结合的,所以改为机械电子工程专业。这就是大概的过程。从63年第一届招生,62年开始筹备的,我是这里的第六个老师。成立三系之后人就多了,有好多教研室,有机械教研室(机械基础和力学教研室),专业教研室(邮政机械教研室),还有电子专业。
韩:当时大概招多少学生呢?
时:邮政机械专业是1963年正式招生。文革前共招三届学生,每届1个小班(约30人)。校内称呼为机设6301,机设6401,机设6501。后来文革就没有招生。72年开始招收工农兵学员,机械和电子专业,学制3年。一直延续到82年。82年恢复4年制招生。
韩:请问北邮对当时机械工程专业的定位是什么?主要是服务于国家的那个行业?
时:我刚到北京邮电学院时,学院一穷二白,教材,讲义都没有。由于要建设邮件处理中心,全国各地要筹建邮政网络,要服建设邮政通信网,邮政通讯网一开始靠电话调度。要筹建邮政物流网和物流通讯网,需要研制机械设备,如:包裹分拣机,信函分拣机,自动化邮局,自动投递,邮件处理中心流程设计,设备设计。由于邮政机械具备高度机电一体化,网络化的特点,74、75年又研制了信函分拣系统,实现自动识别邮政编码。
韩:当年视觉识别技术远没有现在这么成熟,要实现信函分拣系统应该相当困难吧?
时:是的,当时做了很长时间。邮票非常重要,当时都要求邮票贴在右上角。有理信机,要把信函调整到以邮票为基准的一个位置上,要理信。之后送入信函分拣机,是一个流水线。当时计算机性能不够,所以最早的信函分拣机使用20台386并联,实现一个小时分拣两万多封信件。将信封上的邮票对准红框,用螺旋管进行扫描,识别手写体的邮政编码,识别成功率90%,这个分拣机在78年全国科学大会获奖。
机械设备具有高度机电一体化的特点,当前邮件分拣机也是使用机器扫描,机械的出口设计的窄,不易出错。对学生对电方面知识的掌握要求比较高,一开始机器主要识别条形码和二维码,后来机器识别用途更广了,就成立了独自的专业。邮政机械同时也要求控制类知识的掌握。
目前包裹分拣机用的比较多了,其仍然具备机电结合的特点,有人工智能的技术,但其中的图像处理技术是从最初的二维码,条形码的识别发展而来的,并成立了独立的专业。
邮政机械中,机械和电子的比重大约四六开,支持邮政机械的网络后来发展成为了互联网。最初的邮政网发展成为了邮件处理中心。邮政机械同一般的机械专业不同,往智能化方向发展,同人工智能联系密切,因为要进行大量的图像识别。
韩:目前机械专业的培养也是保留了您当年创立下的框架,强调机电结合的培养,电的比重较大。
时:我之前在世纪学院强调对学生软件的学习和使用,强调学习C语言,做减速机绘图时强调运用计算机二维和三维的绘图,将计算机绘成的图直接用到数控机床上,形成产品。在电方面,抓学生单片机的学习,教学图像处理,实验做一个机器人,在电方面教学要求比机械方面高。注重学生实践能力的培养。
韩:您非常有预见性,目前国家提智能制造和工业4.0,其实就是工业的信息化和自动化
时:是的,我们邮政机械一开始离不开网。邮件一开始通过电话调度,联系。最原始的就有邮件的实物网,有邮件的调度网,后来就出现了互联网,应该说邮政是互联网的祖师爷,世界范围内也是这样的,这是由其生产特点决定的。邮件识别具有形成多个网络的特点,称为邮件处理中心,邮件处理中心有各种各样的机器,在邮政行业用处很大。
韩:时老师,您提到当年研发自动分拣机,像这样的大型设备大型项目由邮政部等国家部委组织的吗?
时:是的,当时邮政部组织了一个会战,大概组织了全国七个单位吧,总指挥是当时邮电部的副部长。总工是当时上海三所的所长。我当时是负责具体操作的,做技术负责的,从75年起一直做到78年,在78年全国科学技术大会上展览。当时这个自动分拣机是邮电部第三研究所做的,这个项目是部里的项目,我当时做了很多部里的项目,一直做到90年代。90年代放开以后,又和社会上的企业做了一些项目,大概占总项目的20%,比如和香港的企业。做一些流水线或是图像识别之类的,我们有现成的技术。后来,我60多岁,有点累了,就帮助部里做标准,做了五年,邮电系统的20多个标准。当时和几个老师和研究生共同做标准,我文笔比较好,做出来的效果不错。2005年之前我一直做的中央的项目,后来和企业做的很多项目,大概有40个,一直做到了2010年之后了。我在2006年要退休了,学校又成立了物流工程专业,我被返聘到学校当学科带头人。我在2011年的时候还带着研究生。
韩:现在物流专业(邮政工程)和机械专业都在咱们现代邮政学院。
时:物流专业创办的时候必须有学科带头人,我当时技术比较好,材料也多,学校就找我担任学科带头人。后来学校又成立世纪学院,我又到世纪学院机械系担任系主任。我一直在做邮政或是物流,邮政可以说是最早的物流。
韩:现在国家的一些偏远地区,像四通一达到不了的的地方,还是得靠国家邮政来送信送包裹。
时:顺丰目前也在注重开发邮件分拣机,他们也在招大量的人才,像我的学生有的已经做到邮政分拣机项目的带头人了。总的说,这个专业还可以。邮政和电信相比,虽然名义上邮电邮政在前,但不如电信受重视,一开始我也不是很想做邮政项目,但后来做着做着,我也觉得它很好,后来就一直做了下去,一直做到2016年。后来到世纪学院做的工作比较多,我非常注重实践,怎么实现电控柜,如何安装调试,都在实验室讲,每个人都有动手实践的机会。我和学生合作的比较好,培养了一些优秀的学生,每年我都带着两三个学生,有许多比较好的学生,都很有兴趣。
韩:就您所知,机械专业培养出了哪些杰出校友?
时:培养了许多干部,像管理局的局长,物流总公司的老总,普天物流的老总。后来许多学生去互联网就职了。我很重视学生C语言的学习,让他们有一定的编程基础,这样学其他的程序就好学了。最后我这几年的学生,都从事软件行业了。后来我也注重信息采集和网络上的东西,偏重于软件了。硬件科研时间比较长,对于一个研究生来说一年不够,后来就注重软件方面的培养了。90年代到2000年出国的特别多,我的学生每年有7-8个出国的。再往前,我的学生当干部的比较多,大约有十来个当局长的。最近的学生从事软件行业比较多,我就注重数学和英语的教学。我对电方面比较熟,比如各种仪表比较熟,对电视机,扫描仪比较熟。
韩:当前学校院系调整,机械专业划入现代邮政(自动化)学院。您认为机械专业教师应如何加深与邮政、物流领域的合作?有什么好的合作经验?
时:关注每年的项目组和大的物流公司做什么项目。我写过好几本书。帮助解决邮政专业教材的短缺。后来帮助邮电部做了许多标准,标准不好做,一个标准七八万字,但后来发现也挺有意思的,也坚持做下去了,我还写过许多科研指南。后来帮科技部做视频系统,帮助北京上海广州做视频卡。
韩:在您看来,物流工程和机械工程主要区别是什么?
时:物流工程以系统集成、网络节点设计为主,机械工程以机械设备设计为主。原来机械工程和物流工程专业教学大纲和课程大纲都是我做的。后来这三个专业还进行过展览,我也帮助做了些工作。
韩:感谢您接受采访,祝您身体健康,万事如意!
时:好,谢谢。
9.4 李景湧教授撰写的机械工程专业早期发展史
(一)
自动化学院是2000年正式成立的,然而它的历史却可追溯到1960年。1960年,邮电部为推进邮政自动化工作的进程,委托北京邮电学院筹办邮政机械专业。同年,北京邮电学院在工经系成立了邮政机械教研室,当时有教师6人,刘永为任组长,并派青年教师到上海交大进修,当年招收邮政机械专业专科班118人。这个班的学员1963年毕业,他们是我国邮政机械化、自动化的先行者和骨干力量,为我国邮政事业做出过杰出的贡献。为了促进我国邮政事业的现代化,1963年起工经系正式招收通用机械专业本科班,为了加强教学工作,邮政机械教研室与机械原理、机械零件教研室合并成立通用机械教研室,归基础部管理,基础部原有力学教研室和工艺教研室,这就为后来成立机械系打下了良好的基础。通用机械专业在文化大革命前的1963年、1964年、1965年共招收学生92人,在此期间,该专业的教师们参加了邮电部组织的邮政自动化技术革新会战。1964年参加北京邮政局的自动化邮局会战(研制自动邮资机等)。1965年、1966年分别在上海邮政局和北京邮政局参加了自动包裹分拣机的会战。他们为我国邮政事业的现代化与自动化作出了重要贡献。
1972年,北京邮电学院正式成立了机械工程系,系主任徐大雄,总支书记李丰。同年通用机械专业开始招生,1973年设电信机械一个专业招生,1974—1976年设邮政机械和电信机械两个专业招生,五年间共招收学生466人。当时的机械工程系有80名教师,分三个专业连队进行教学。在此期间,除进行课堂教学以外,老师还带领学生下厂实践,一部分人参加了广州流花邮局运转车间的技术革新与改造工程,设计制造了我国第一套分拣邮袋的推式悬挂系统;一部分人参加了北京市话局沙窝修配厂的技术革新工作;还有一部分人参加了北京无线电仪器厂的技术革新工作,改进了机床的自动化程度,其中一部分人参加了北京市话局77分局准电子交换机的结构设计。同时还有部分教师参加了邮电部重点项目“信函分拣自动化系统”的研发工作。这些都为我国邮电事业的发展贡献了他们的力量,受到企业的好评。
(二)
1977年恢复高考当年,邮政机械、电信机械两个专业共招收了本科生122名。1979年开始招收机械设计学科硕士生2名。1977年至1985年机械工程系主任是高国安,副主任费时雨、车路(后为张彦林),总支书记李丰,副书记郭才旺。当时有教师80多名,分为六个教研室,即:邮政机械、电信结构、自动化、机械基础、机制工艺、工程力学。一部分教师仍参加邮政自动化方面的会战科研,另一部分专门从事电子设备结构方面的科研工作。由于信函分拣机是机光电一体化的机械,所以我们的邮政机械专业可以说是我国最早的机电一体化专业。在教学计划中,与一般机类工程专业相比,机类学时要少一些,而电路、计算机、自动控制类课程要多一些。
在这期间,章继高、梁崇高、王士耕三位教师出国进修,两年后学成回国,为开展机械工程系的科研工作打下了良好的基础。
1977年至1984年,按教委的要求,专业名称有几次变动:1980年,邮政机械、电信机械两个专业合并为一个专业——邮电机械,到1984年邮电机械又分为电子精密机械和电子设备结构两个专业,同年又新增加了一个硕士点——机械制造。
从1977年到1985年共招收本科生780人,招收硕士28人,招收结构大专班66人。
1985年系领导班子进行了调整,系主任王士耕,副主任费时雨、王文秀,党总支书记郝维新(1990年张金声为书记),副书记相俊英。1993年,自动化教研室改为电路基础教研室,并成立了系中心实验室。
1985年至1993年招收本科生513人,硕士生41人,并从1992年开始招收邮政自动化大专班,一直办到1996年,五个年级共招收学生160人。在这期间,本科专业教学计划调整为纯机械专业。
在此期间,科研方面也有辉煌的成绩。梁崇高教授,廖启征教授在机构学方面取得了重大突破,解决了“著名的珠穆朗玛峰”问题,并获得了国家自然科学四等奖,在国际上也受到好评。章继高教授领导的科研组在电接触理论与机电元件可靠性方面取得了创造性的成绩,尤其对“尘土对电接触的影响”进行了全面的、深入的研究,揭示了尘土对电接触的机理,获得国家自然科学基金三等奖。王士耕教授在数控加工方面有独到的研究,在我国首先解决了化工生产中叶轮曲面加工的数控问题。
1993年,系领导班子进行了新的调整,系主任张金声,副主任李景湧、孙百生,总支书记相俊英,副书记王翔。当时有教师45人。设有邮政机械专业教研室、结构专业教研室、机械基础教研室、电路基础及微机应用教研室和系中心实验室。1995年,按教育部要求,将原电子精密机械和电子设备结构两个专业合并为机械电子工程专业。
该届领导班子制定了“八五”发展规划,提出了以下几个目标:
1、继续支持机械学和电接触两个科研组的发展,重点支持邮政自动化科研的发展,促进学术创新,为建立博士点创造条件。
2、积极引进人才,建立一支高水平的师资队伍和学术梯队,争取尽快建成博士点。
3、修订机械电子工程专业的教学计划,除继续办好邮政机械、电子设备结构两个方向外,要努力办好机电一体化方向,以适应边缘学科的发展。
4、积极筹建自动化专业,扩大招生规模。
从1993年到2000年尽管系领导班子在不断调整,但他们始终带领大家为学校进入“211”,为早日建立机械类博士点而不懈奋斗。
这期间,系领导班子作出了以下调整:
1994年,系主任廖启征,系副主任李景湧、孙百生、周晓光。
1996年,李景湧任总支书记,程宏任总支副书记,周晓光、时良平任系副主任。
1997年,李景湧任系主任,邓中亮、时良平、周晓光任副主任。王强任总支书记,周晓光兼任总支副书记,这期间制定了“九五”发展规划,并切实做好八件大事:
1、1995年修订了机械电子工程专业的教学计划,调整机械类与电子类课程的比例,减少机械类课程学时,增加电路、计算机、控制类课程学时。使该专业更适合机电一体化方向,使学生更适应新形势的要求。
2、1996年建立了工业自动化专业,1999年筹建工业设计专业。
3、大力引进或培养人才,1993年教师中有博士学位的仅一人。到2000年,有博士学位的教师13人,占师资总数的47%。博士生导师由2名增加到7名。
4、积极参加学校的“211工程”建设。建成了两个部级重点实验室——“电接触实验室”和“邮电机械自动化与智能化实验室”。
5、自1997年到2000年科研经费累计2000多万元,购置了一批仪器设备,为以后的科研打下了良好的基础。
6、1997年开始招收了“计算机通信”专业成人大专班,不仅培养了大批学生,也改善了教学条件。
7、1998年,建成机械工程硕士点一个。
8、1999年,组织部分教授集资建设实验室用房1360m2,为后来扩大招收研究生打下了基础。
2000年,机械电子工程系正式更名为自动化学院。院长孙汉旭,副院长刘晓平、许良军,总支书记相俊英。刘晓平兼任副书记。
2003年,学院领导班子进行调整,院长孙汉旭,副院长许良军、杨军,总支书记相俊英,副书记庄育锋。2005年6月,相俊英书记调到北京邮电大学世纪学院任职,陈丽媛担任总支书记。
在这期间,自动化学院的招生专业有了较大的变化:
2000年新增工业设计本科专业,2001年新增检测技术与自动化装置硕士点一个,2002年新增测控技术与仪器本科专业,2004年新增物流工程本科专业一个。2005年新增物流工程硕士点。
学院的学生规模有了很大的增加:
本科生招生人数从2000年150人发展到2005年306人,研究生招收人数也由每年30多人扩大到每年120多人。
经过几年调整,自动化学院的办学方面主要是面向社会,特别是为信息产业领域培养工业自动化、机械工程及自动化、工业设计和测控技术与仪器技术、物流工程等方面的高级专门技术人才。学院现有四个教研中心:机电工程中心、检测技术与自动化中心、工业设计中心、物流工程中心,共有在编教职工46人,其中院士兼特聘首席教授1人,教授职称13人,副高级职称21人,中级职称7人。另外还有兼职教授11人,名誉教授3人,返聘教授2人。学院现有1个博士点,5个硕士点,1个工程硕士专业,4个本科专业。学院现有研究生导师21人,其中,博士生导师7人。
目前学院所设的本科生招生专业有:机械工程及自动化、工业设计、自动化、测控技术与仪器、物流工程。招收博士研究生的专业有机械电子工程博士点。硕士研究生招生专业有:机械电子工程、机械设计及理论、检测技术与自动化装置、机械制造及自动化、物流工程、机械工程(工程硕士)。我院培养的毕业生理论基础扎实,知识面广,毕业后就业面广,深得国内外高校、通信、邮政、外企及其他用人单位的好评。
学院学术交流非常活跃,教师经常参加国内外各种学术交流。学院与美国、日本、加拿大、波兰、香港、澳门等国家和地区的大学及企业有长期稳定的合作关系,近几年来先后派出10余名教师到国外做访问学者,或进修、或进行科研合作等。学院还聘请了国内外知名教授为学院的兼职教授,我院也有多位教授受聘于其他学校与科研单位的兼职教授与技术顾问。学院经常举办学术讲座,邀请国内外专家学者来院作学术报告。我院的教授还多次参与主持国内外学术会议。通过这些学术交流进一步加强了我院的学术氛围,提高了我院的学术科研水平和在国内外同行间的知名度。
科研情况
我院在机器人机构学、空间机器人、电接触理论及应用、测控与通信微系统、物流自动化、动态检测与机械振动、系统辨识、微机械电子系统、自动化与邮政技术、CAD/CAM技术、产品设计、多媒体设计等方向广泛开展研究。目前学院教师承担科研项目20余项,其中有国家自然科学基金、国家863项目、国家973项目及横向科研项目等,项目经费充足。近十年来,我院共获得国家自然科学三等奖、四等奖各一项,省部级以上科技成果奖励32项。
我院的科技成果包括:《空间攀附式攻击机器人、捕获网技术方案研究》、《空间实验室舱内机器人综合服务系统》、《太空智能可控变形桁架的理论研究》等空间机器人方面科研成果;《球形行走机器人的研究》、《120kg电焊机器人性能测试》、《极轻机构及机器人柔顺装置的灾变分析与综合》等各类机器人研究成果;也有《赤峰华源毛业有限公司企业信息化项目建设规划》、《山西省邮政局端新增值系统》、《北京西站悬式推挂机联网及调度程序修改工程》等校企合作实践成果及其他各类科研成果。
自动化学院始终在快步前进,积极参加学校“211工程”项目建设,于1996年至2001年间承担建设了现代邮电机械系统自动化、智能化实验室。
项目首席专家梁崇高,主任邓中亮,副主任时良平,委员章继高、廖启征、李景湧、周晓光。项目主要参与人员还有孙汉旭、祝明德、郝仰梅、孙百生、许良军、刘晓平、杨军、高宝成。
项目建设目标为通过本实验室建设,在机械学、智能控制及自动化、电接触可靠性三个研究方向上为我国相关领域提供理论、技术支持,解决国家在这些研究方向上的重大难题和理论技术问题,并在研究过程中培养一批博士后、博士、硕士等高层次技术人才。在机械学方面,特别是机器人运动学方面要保持国内领先,争取国际知名的地位。在自动化方面进入国际先进水平。在电接触方面,保持国际先进水平。
在“211工程”项目建设过程中,我院取得了显著成果。
(1)师资队伍建设:
我院建设了一支结构合理的高水平师资队伍:1996年开始引进博士(包括博士后)3人,留校博士生2人,送国外培养博士1人,校内在职培养了博士1人,在全院31名教师中,13人具有博士学位,占全院教师42%。目前正在国外攻读博士的青年教师2人,在国内攻读在职博士的3人。原有博士生导师2名,新增博士生导师4名。
(2)学科点建设:
我院原有机械设计及理论硕士点、机械电子工程硕士点,新建机械工程(工程硕士)、检测技术与自动化装置2个硕士点。
(3)新开设重点课程:
我院新开设了《机电元件设计技术》(研)、《材料的力学性质》(研)、《电子材料学》(研)、《机械原理》、《计算机辅助几何设计》、《CAD/CAM技术》6门重点课程。
(4)新编教材与专著:
我院新编教材5本,专著6本。
(5)学科实验室建设:
我院建成了“邮电机械自动化与智能化部级重点实验室”。实验室内配置有9自由度模块化机器人、自行研制虚轴机床、振动试验台及控制系统等先进实验设备,形成了机器人机构学理论与冗余度模块化机器人研究平台。实验室内配置的面向电子商务的物流系统研究实验平台、自动化立体库、邮政综合计算机网模拟系统、高速大景深条码签自动识别系统等实验设备及系统,形成了以邮政生产为主、面向电子商务的物流系统研究实验平台。
我院建成了“通信与电子系统电连接可靠性部级重点实验室”,该实验室是亚洲一流的实验室,是该学科世界知名的研究单位之一。实验室内配置有扫描电子显微镜和X-射线能谱仪、X-射线测厚仪、三维形貌仪、高频阻抗测试仪等设备。
(6)科研成果:
我院承担国家级科研项目18项,总经费210万元;省部级项目14项,总经费390万元;国际合作项目4项,总经费785万元;横向合作项目19项,总经费991万元;成果转化2项。我院自筹科研经费634.7万元,自筹经费建科研用房1100m2。
(7)国内外学术交流:
我院聘请兼职教授国外8名,国内3名,包括日本真野教授、美国Dufy教授、加拿大Gosselin教授、美国Richard·W·Vook教授等国际知名教授。
我院教师积极参加国际学术会议与国际交流并参与主持国内外学术会议:主持国际会议7人次,主持国内会议3人次。我院章继高教授、廖启征教授、许良军教授、刘晓平教授等均作为出国访问学者前往各国高等院校或科研机构进行交流学习。
我院举办讲座与培训班,为台湾培养电接触人才。
(8)人才培养:
“211工程”项目建设期间,我院培养博士后2人,博士19人,硕士137人。
(9)科研项目:
我院科研项目包括:《智能邮戳CAD/CAM系统》、《雕刻学习系统》、《自行研制行走机器人》、《自行研制球形机器人》、《机器人邮袋开拆仿真》、《列车卫星电视随动接收天线》、《邮政电子化支局演示系统》、《计算机集成柔性输送包裹自动化分拣系统》等多个领域的丰富成果。
(10)获奖情况:
我院教师获得自然科学奖、国家教委科技进步奖等国家奖项,也获得了知名企业颁发的荣誉奖项;我院学生也在校内外积极参加各类学科竞赛、创新创业竞赛并收获诸多奖项。
十.后记与撰写说明
机械工程专业发展历史和沿革是由现代邮政学院2022年当时的领导班子闫强、袁喆颖、魏世民、王琦、刘佳等领导委托机电中心进行撰写,由机电中心李金泉老师牵头并统稿,由众多老师带领自己的研究生参加撰写。各位老师的分工如下:李海源老师负责撰写学生获奖情况,方维老师撰写科研情况,各实验室的简介由各相关老师撰写(陈钢老师、宋荆州老师、张英老师、刘晓平老师、孔志刚老师、苏柏泉老师、李金泉老师);教学相关成就由李金泉老师和徐晓慧老师撰写;由闫海滨老师采访李景湧老师,韩磊老师采访时良平老师,张英老师采访廖启征老师,孔志刚老师采访许良军老师。
特意委托李景湧老师撰写专业早期的发展历史(见附件),专业在2000年特别是2005年之后的资料留存较多,这需要感谢李梅峰老师当时细致的工作,同时感谢陈士燕老师的热情帮助,正是两位老师的工作才使得查找相关资料变得容易了一些,才能进一步理顺机械工程专业、学科和科研平台等的建设脉络。
因为早期资料没有电子化,同时限于资料收集整理的难度、疫情的影响等客观因素,本次撰写材料收集的并不全面,撰写的历史可能有所疏漏,虽然撰写者尽可能地客观描述,但是限于时间、精力以及各种外在条件,同时也由于撰写时的理解偏差,一些事情的描述有可能与原本的内情有所差异,如有此种情况敬请谅解。
甚望后续者有时间和精力对北京邮电大学机械工程专业的发展历史进行精准地整理和记录。
李金泉
2022.10.21


